Madon välityssuhde ja sen laskeminen — kaavat, esimerkit, todelliset tapaukset
Madon ja matopyörän parin aritmetiikka, kolme käytännön esimerkkiä ja kokonaislukuhampaan todellisuus, joka pilaa oppikirjojen puhtaat suhteet.
Madon välityssuhde on pyörän hampaiden lukumäärä jaettuna madon käynnistysten lukumäärällä: i = Z₂ / Z₁. Yksittäiskäynnistetty mato, joka on kosketuksissa 40-hampaisen pyörän kanssa, antaa välityksen 40:1. Nelikäynnistetty mato samalla pyörällä antaa välityksen 10:1. Hyötysuhdetta säätelevät nousukulma ja kitkakulma kaavan η = tan(λ) / tan(λ + φ) mukaisesti – tyypillisesti 60–70 prosenttia korkean välityssuhteen omaavissa yksikäynnistyskäyttöissä ja 85–92 prosenttia matalan välityssuhteen omaavissa monikäynnistyskäyttöissä. Vaadittu syöttömomentti on yhtä kuin lähtömomentti jaettuna (suhde × hyötysuhde) -luvulla, ja kokonaislukuhammasten lukumäärä tarkoittaa, että todellinen välityssuhde on harvoin se puhdas luku, jonka kirjoitit erittelylomakkeeseen.
Kaksi kaavaa, joihin jokainen matokäyttö palaa
Unohda hetkeksi pitkät listat nousu- ja moduuliyhtälöistä. Kaksi kaavaa määrää 90 prosenttia mato- ja matopyöräparin suunnittelupäätöksistä, ja useimmat laskentavirheet kentällä johtuvat näiden kahden virheellisestä soveltamisesta – eivät edistyneestä geometriasta.
Kaava 1 — Alennussuhde (kinemaattinen)
i = Z₂ / Z₁
Jossa Z₁ on madon käynnistysten lukumäärä (1, 2, 3, 4, joskus 6) ja Z₂ on pyörän hampaiden lukumäärä. Tämä on puhdasta geometriaa – materiaali ja voiteluaine eivät tule mukaan yhtälöön.
Kaava 2 — Mekaaninen hyötysuhde
η = tan(λ) / tan(λ + φ)
Jossa λ on madon nousukulma (aloitusten ja madon nousun halkaisijan funktiona) ja φ on kosketuksen kitkakulma (5–8 astetta hyvin voidellulla teräs-pronssi-liitoksella, 10–15 astetta huonosti voidellulla). Tässä kohtaa materiaali, pinnanlaatu ja voiteluainekemia astuvat kuvaan.
Näiden kahden kaavan tärkeät tekijät johtuvat siitä, että ne kuvaavat matovaihteiston keskeisen kompromissin – korkea välityssuhde tarkoittaa alhaista hyötysuhdetta, matala välityssuhde korkeaa hyötysuhdetta, eikä molempia voi olla samassa sarjassa. Toinen kaava selittää ensimmäisen piilevät kustannukset.

Suhdekaavan lukeminen oikein
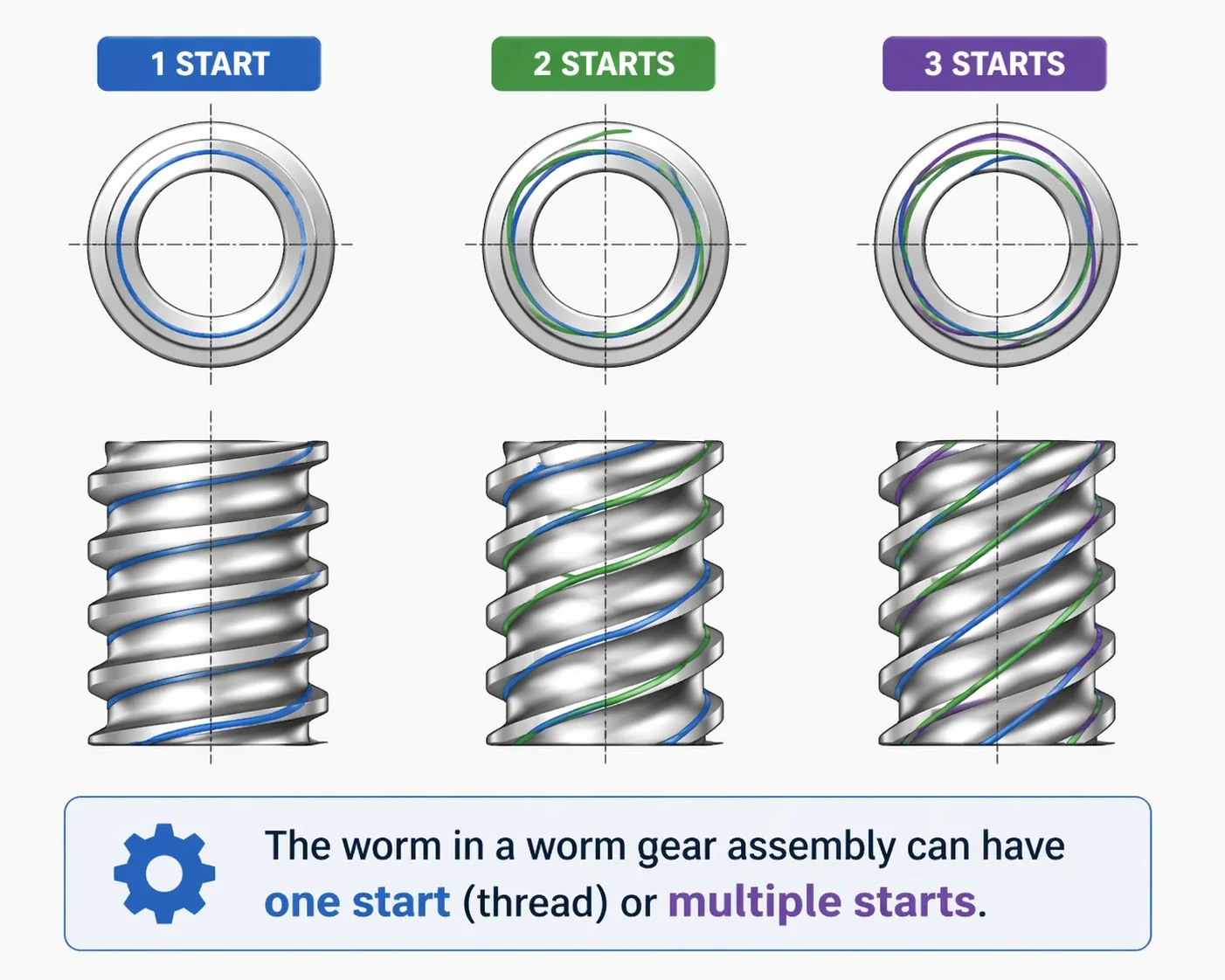
Z₁ laskee kierteisten kierteiden aloituskohtien lukumäärän matossa – ei missään kehäkohdassa näkyvissä olevien kierteiden harjanteiden kokonaismäärää. Katso madon päätä. Yksialkuisessa matossa yksi kierre kulkee spiraalimaisesti akselia pitkin. Kaksialkuisessa matossa kaksi kierrettä kiertyy rinnakkain 180 asteen kulmassa. Neljäalkuisessa matossa neljä yhdensuuntaista kierrettä 90 asteen välein. Visuaalinen vihje on erillisten kierteiden lukumäärä, jonka voit jäljittää madon toisesta päästä toiseen.
Z₂ laskee pyörän hampaat perinteiseen tapaan — hampaiden kokonaismäärän pyörän kehän ympärillä. 40-hampaisessa pyörässä on 40 hammasta. Luku on fysikaalisesta välttämättömyydestä johtuen kokonaisluku; sinulla ei voi olla 40,5 hammasta.
Kokonaislukuansa, joka pilaa puhtaat oppikirjan suhteet
Sekä Z₁:n että Z₂:n on oltava kokonaislukuja, ja tällä rajoitteella on suurempi merkitys kuin useimmat laskimet myöntävät. Jos asiakas pyytää ”täsmälleen 35:1”, suunnittelutiimimme on kerrottava heille, että he saavat yhden kolmesta lähimmästä käytännöllisestä suhteesta: Z₂ = 35, jossa Z₁ = 1, antaa tarkalleen 35:1, Z₂ = 70, jossa Z₁ = 2, antaa tarkalleen 35:1, tai Z₂ = 36, jossa Z₁ = 1, antaa 36:1 (2,9 prosentin ylitys). Valinta riippuu siitä, mitä muuta sovellus tarvitsee – Z₂ = 35 sopii hyvin yksikäynnistysiselle käytölle, Z₂ = 70 kaksinkertaistaa pyörän halkaisijan samassa moduulissa ja Z₂ = 36 on pieni kompromissi, jonka avulla voidaan käyttää yleisempää pyörän kokoa.
35,5:1-suhteen pyytäminen ei yksinkertaisesti toimi – ei ole olemassa kokonaislukuparia, joka antaisi täsmälleen kyseisen suhteen. Suunnitteluarkilla oleva puhdas luku on pyöristettävä sellaiseen muotoon, jonka tehdas voi todella leikata. Korealaisissa ja japanilaisissa OEM-sovelluksissa, joissa alavirran pulssianturit ja moottorinohjaimet olettavat tarkan välityssuhteen, pyöristäminen on tehtävä suunnitteluvaiheessa, ei osien valmistuksen jälkeen.
Miten tehokkuus seuraa johtokulmasta
Kierteen nousukulma λ on kulma kierteen kierteen ja kierteen akseliin kohtisuorassa olevan tason välillä. Yksialkuisella, pienellä nousuhalkaisijalla varustetulla kierteellä λ voi olla 3–5 astetta. Nelialkuisella, samalla nousuhalkaisijalla ja moduulilla varustetulla kierteellä λ nousee 15–20 asteeseen. Suhde on geometrinen: useampi aloitus samalla moduulilla tarkoittaa jyrkempaa kierrettä.
Syötä numerot hyötysuhdekaavaan, niin kompromissista tulee konkreettista. Oletetaan, että kitkakulma φ = 6 astetta, mikä on realistinen hyvin voidellulle teräkselle fosforipronssilla:
Käyrän muodolla on merkitystä. Joustokulman muuttaminen 3°:sta 10°:een lähes kaksinkertaistaa hyötysuhteen. Muuttaminen 20°:sta 30°:een tuskin muuttaa arvoa. Korkean hyötysuhteen omaavien monikäynnistyskäyttöjen optimaalinen käyttökulma on noin 15–20 asteen joustokulma – sen ylittyessä tuotto pienenee ja pyörän pinnan leveys alkaa vähetä, mikä tekee käytöstä käyttökelpoista. Useimmat luettelossa mainitut mato- ja matopyöräparit sijaitsevat kahdessa klusterissa: 3–5 astetta (korkean välityssuhteen itselukittuva) tai 12–18 astetta (keskivälin välityssuhteen hyötysuhteeseen perustuva).
Näen usein ansan: suunnittelija lukee valmistajan luettelosta arvon ”η = 70 prosenttia” ja käsittelee sitä moottorin mitoituksen vakiona. Se ei ole. Luku 70 prosenttia on nimellishyötysuhde nimelliskuormalla ja nimellisnopeudella. Kymmenesosan kuormalla kitkavääntömomentti vaihteiston sisällä pysyy suunnilleen vakiona, kun taas hyötyvääntömomentti laskee kymmenellä – mitattu hyötysuhde voi laskea alle 30 prosentin. Mitoita aina todellisen toimintapisteen, älä tyyppikilven mukaan. Jos käyttöjaksossa on vain kevyitä kuormia, tulovääntömomentin laskennassa käytettävä prosenttiosuus on osakuorman numero, ei luettelonumero.
Käytännön esimerkki 1 — Kuljetinhihnakäyttö
Litteä hihnakuljetin siirtää 80 kg tuotetta nopeudella 0,5 m/s 40 metrin linjaa pitkin. Vetopyörän halkaisija on 200 mm. Asiakas haluaa jaksottaisen käytön (40 prosenttia päällä, 60 prosenttia pois päältä) ja hiljaisen käytön. Itselukittuvuutta ei tarvita, koska hihna on vaakasuorassa.
Alla oleva läpikäynti näyttää jokaisen aritmeettisen vaiheen hihnavoimasta moottorin valintaan. Sama menettely toimii missä tahansa kuljettimen mitoitusharjoituksessa – ainoa asia, joka muuttuu, ovat syöttöluvut.

Huomaa pyöristyspäätös vaiheessa 5 – tarkka aritmeettinen suhde on 29,4:1, mutta lähin käytännössä saavutettava kokonaisluku-hammassuhde on 30:1, mikä tarkoittaa hieman hitaampaa hihnan nopeutta. Asiakas hyväksyi tämän kompromissin ilman näkyvää eroa kuljettimen ulostulossa. Tämä on normaalia teollisuuskäytöissä.
Käytännön esimerkki 2 — Nostorumpukäyttö

Pieni korjaamonostin nostaa jopa 500 kg 100 mm:n säteellä varustetulla rummulla. Nostonopeudeksi on määritetty 6 m/min. Itselukittuva järjestelmä on pakollinen, koska putoava kuorma olisi turvallisuusriski. Asiakas haluaa käyttää vakiomallista 1 400 rpm:n kolmivaihemoottoria.
Itselukittuva rakenne poistaa monikäynnistyvien maton tarpeen — joudumme käyttämään yksikäynnistysistä rakennetta, jossa on pieni nousukulma, ja hyväksymään hyötysuhteen heikkenemisen.
Tästä laskelmasta erottuu kaksi asiaa. Ensinnäkin itselukittuvuuden hyötysuhde on huomattava – noin 67 prosenttia syöttötehosta muuttuu lämmöksi käytössä. Toiseksi moottorin tehontarve (3 kW) on paljon suurempi kuin sama kuorma tarvitsisi tehokkaassa kierukkakulma-alennusvaihteessa (ehkä 1,5 kW). Asiakas maksaa itselukittumisesta ylimääräisellä sähköllä nostimen käyttöiän aikana. Konepajanostimelle, jota käytetään ehkä 200 tuntia vuodessa, tämä kompromissi on hyväksyttävä. 24 tuntia vuodessa toimivalle tuotantonostimelle se ei olisi – oikea vastaus on kierukkakulma-alennusvaihteisto ja erillinen mekaaninen jarru.
Käytännön esimerkki 3 — Indeksoiva pyöröpöytä
Neljän aseman indeksointipöytä asettaa autojen istuinrunkojen hitsauslaitteita. Jokainen asema pitää painonsa 12 kg, pöydän kokonaismassa on 80 kg ja pöydän säde 400 mm. Indeksointiaika asemaa kohden on 1,2 sekuntia (90 asteen kierto). Liikkeiden välisen pidätysmomentin on vastustettava tahatonta työntöä, mutta itse käyttölaite pidetään sähköisesti servojarrulla – itselukittuvuus on toivottavaa, mutta ei pakollista.
Tämä laskelma on dynaaminen, ei staattinen. Hallitseva kuormitus on pöydän massan kiihtyvyys 90 astetta 1,2 sekunnissa – huippuvääntömomentti saavutetaan kiihdytyksen aikana, ei tasaisen pyörimisen aikana. Servosovellukset tarvitsevat myös pienemmän välyksen kuin kuljetin- tai nostinesimerkit.
Kiihtyvyysprofiili olettaa kolmiomainen nopeusramppi — ensimmäiset 0,6 sekuntia kiihdytetään, viimeiset 0,6 sekuntia hidastetaan. Huippukulmanopeus keskipisteessä on 2 × 0,785 rad / 1,2 s = 1,31 rad/s. Huippukulmakiihtyvyys on 1,31 / 0,6 = 2,18 rad/s².
Yhteenvetona voidaan todeta, että dynaamisissa indeksointisovelluksissa laskenta perustuu kiihtyvyysmomenttiin, ei vakiomomenttiin. Pöydän itse polaarinen hitausmomentti on usein tärkeämpi kuin työkappaleen massa, erityisesti raskaissa teräksisissä pyöröpöydissä. Servomoottorin valinnan on täytettävä huippumomentti, ei keskimääräinen vääntömomentti – tämän epäonnistuminen on yleisin syy indeksointiprototyyppien pysähtymiseen ensimmäisen syklin aikana.
Yleisiä laskuvirheitä, jotka tuhoavat suunnitelmat
Z₁:n ja Z₂:n sekoittaminen. Yllättävän monessa ensimmäisessä piirustuksessa matoja käytetään käynnistysjärjestelmissä, joissa pyörän hampaat on vaihdettu – joku on kirjoittanut pyörän hammasluvun siihen kohtaan, johon kaava odottaa madon käynnistyvän. Tuloksena on laskennallinen suhde 1/40 40:n sijaan, mikä saa matematiikan näyttämään absurdilta ja pysäyttää suunnittelun. Merkitse aina selkeästi: Z₁ matolle, Z₂ pyörälle.
Unohtuu jakaa tehokkuudella. Perussuhde antaa sinulle kinemaattisen suhteen tulo- ja lähtönopeuksien välillä. Sen muuntaminen vääntömomentiksi vaatii jakamisen hyötysuhteella. Jos et käytä hyötysuhteen jakajaa, määrität moottorin, joka on aivan liian pieni. Taajuusmuuttaja jumiutuu nimelliskuormituksella. Tulovääntömomentti = lähtövääntömomentti ÷ (suhde × hyötysuhde), aina.
Tehokkuuden käsittely vakiona. Julkaistu nimellishyötysuhde on nimelliskuormalla. Kevyen kuormituksen hyötysuhde on paljon alhaisempi, koska vaihteiston sisällä oleva kitkavääntömomentti pysyy suunnilleen vakiona, kun taas hyödyllinen vääntömomentti pienenee. Käytä aina toimintapistehyötysuhdetta, älä nimellisarvoa.
Staattisen vääntömomentin käyttö dynaamisissa sovelluksissa. Indeksointipöydät, iskukuormitetut nostimet ja kaikki usein käynnistys-pysäytysjaksoja sisältävät käytöt on mitoitettava huippukiihtyvyysmomentin, ei tasaisen tilan momentin, mukaan. Huippuarvo voi olla 2–4 kertaa tasaisen tilan arvo syklin kestosta riippuen.
Vaativat ei-kokonaislukusuhteet. Pyynnölle 47,3:1 ei ole ratkaisua. Pyöristä lähimpään käytännölliseen kokonaislukuvälitykseen suunnitteluvaiheessa. Jos ohjain alavirran puolella tarvitsee tarkan välityssuhteen, suunnittele ensin välityssuhde ja anna ohjaimen skaalata sopeutua todelliseen välityssuhteeseen.
Palvelutekijän unohtaminen. Lasketun nimellismomentin mukaan täsmälleen mitoitetulla taajuusmuuttajalla ei ole marginaalia verkkojännitteen vaihteluille, ikääntymiselle, satunnaiselle ylikuormitukselle tai lämpövaihteluille. Käytä käyttökerrointa 1,3:n (kevyt ajoittainen) ja 2,5:n (voimakas iskukuormitus) välillä ennen moottorin ja vaihteiston valintaa.
Usein kysytyt kysymykset
K: Onko välityssuhde sama kuin alennussuhde?
Madon ja matopyörän parille, jossa mato on voimanlähde, kyllä — välityssuhde i = Z₂/Z₁ on yhtä suuri kuin nopeuden alennussuhde. Toisioakseli pyörähtää kerran jokaista tuloakselin i kierrosta kohden. Harvinaisissa asetteluissa, joissa pyörä pyörittää matoa (takavetoiset monikäynnistysmallit, joita käytetään vapaakytkiminä), välityssuhteen kaava pysyy samana, mutta kinemaattinen tulkinta vaihtelee. Matoa vetävä pyörä on vakiotapaus ja ainoa, joka vaatii yksiselitteistä käsittelyä.
K: Miten nousukulma lasketaan madon mitoista?
Nousukulma λ = arctan(L / (π × d₁)), jossa L on nousu (aksiaalieteneminen kierrosta kohden = Z₁ × aksiaalijako) ja d₁ on kierteen nousun halkaisija. Yksialkuiselle matolle, jonka aksiaalijako on 9,42 mm ja nousun halkaisija 36 mm: L = 9,42 mm, π × d₁ = 113,1 mm, joten λ = arctan(9,42/113,1) = 4,76°. Monialkuisilla matoilla on suhteellisesti suurempi nousu – kaksialkuisella matolla, jolla on sama nousu ja halkaisija, λ = arctan(18,84/113,1) = 9,46°.
K: Mikä on tyypillinen kitkakulma teollisuusmatovaihteissa?
Hyvin voidellulla teräksellä fosforipronssilla, jossa on käytetty synteettistä vaihteistoöljyä, kitkakulma φ on noin 5–7 astetta (μ = 0,087–0,12). Mineraaliöljyllä kohtalaisessa lämpötilassa se on 7–9 astetta. Huonossa voitelussa tai sisäänajo-olosuhteissa 10–15 astetta. Liukunopeus vaikuttaa kitkaan: hyvin pienillä nopeuksilla (alle 0,5 m/s) rajavoitelu on hallitsevaa ja φ hiipii ylöspäin; kohtuullisilla nopeuksilla (1–5 m/s) hydrodynaamiset vaikutukset vetävät φ:tä alaspäin; erittäin suurilla nopeuksilla lämpeneminen alkaa työntää φ:tä takaisin ylöspäin. Useimmat teollisuuslaskimet olettavat vakioksi 6 astetta ensikierron arviona.
K: Miten saan tarkan epästandardin leikkaussuhteen, kuten 50,5:1?
Et voi – et yhdestä mato- ja matopyöräasteesta. Suhteen Z₂/Z₁ on oltava kokonaislukujen suhde, ja 50,5 = 101/2, joten ainoa yksivaiheinen ratkaisu on Z₁ = 2, Z₂ = 101. 101-hampainen hammaspyörä on epätavallinen, mutta valmistettavissa. Yleisempi lähestymistapa on käyttää kahta vaihetta: 50:1-matoastetta, jota seuraa pieni lieriö- tai planeettavaihe kokonaissuhteen hienosäätöön. Kaksivaiheiset käytöt saavuttavat myös yli 200:1-välityssuhteita, joita mikään käytännön yksivaiheinen matovaihteisto ei pysty saavuttamaan puhtaasti.
K: Miksi mitatut hyötysuhdeluvut ovat pienempiä kuin kaava ennustaa?
Kaava η = tan(λ)/tan(λ+φ) antaa vain hammaspyöräkytkentähyötysuhteen. Täydellinen matovaihteen alennusvaihde sisältää myös laakerihäviöitä, öljytiivisteen vastusta ja öljyn pyörtymishäviöitä, joita ei ole otettu huomioon kaavassa. Käyttövoiman kokonaishyötysuhde on tyypillisesti 5–10 prosenttiyksikköä hammaspyörävälitysluvun alapuolella. Yksikölle, jonka ennustettu η_mesh = 70 prosenttia, käyttövoiman kokonaishyötysuhteen odotetaan olevan noin 60–65 prosenttia. Penkissä mitatut luvut, jotka ovat kaavan ennusteen alapuolella, ovat normaaleja, eivätkä ole merkki ongelmasta.
K: Voiko matovaihteen välityssuhde muuttua ajan myötä yksikön kuluessa?
Ei — suhde määräytyy hampaiden lukumäärän mukaan ja pysyy vakiona koko kokoonpanon käyttöiän ajan. Kulumisen myötä muuttuvat välys (pieni pyörimisvälys madon ja pyörän välillä peruutuskuormituksen aikana) ja mahdollisesti hyötysuhde (pinnan karheuden ja voiteluaineen olosuhteiden muuttuessa). Itse suhde on geometrinen ja muuttumaton niin kauan kuin sekä hampaat että kierteet ovat olemassa.
K: Kuinka tarkkoja nämä kaavapohjaiset tehokkuusennusteet ovat?
Ensimmäisen kierroksen mitoituksessa kaavan ennusteet ovat tarkkoja ±5 prosenttiyksikön tarkkuudella, jos valitset realistisen kitkakulman. Kriittisten sovellusten moottorin lopullista valintaa varten pyydä toimittajalta penkkitestaustietoja – useimmat hyvämaineiset valmistajat, mukaan lukien meidän valmistajamme, voivat toimittaa mitattuja hyötysuhdekäyriä useilla kuormitus- ja nopeuspisteillä. Kaava on oikea työkalu suunnittelun alkuvaiheessa; penkkidata on oikea työkalu lopulliseen päätöksentekoon.
Madon ja matopyöräparin laskeminen on suoraviivaista, mutta armotonta. Jos perussuhdekaava menee väärin, matemaattinen hölynpöly on heti nähtävissä. Hyötysuhdelaskelma menee väärin, ja vetolaite toimitetaan, käy kuumana, rikkoutuu takuun mukaisesti ja virhe piiloutuu kuukausiksi, kunnes kentän tulokset alkavat palautua. Artikkelin alussa olevat kaksi kaavaa kantavat käytännössä koko kuorman – ne on vain sovellettava todelliseen toimintapisteeseen realistisilla kitka-arvioilla ja pyöristettävä kokonaislukuihin hammasmääriä, joita tehdas voi todellisuudessa tuottaa.
Korealaisille ja japanilaisille OEM-suunnittelutiimeille, jotka haluavat laskelmien tarkistuksen ennen moottorin ja välityssuhteen spesifikaatioihin sitoutumista, suunnittelutiimimme järjestää matovaihteen laskentakaavan tarkastelu käyttöjaksoasi vasten, soveltaa realistista tehokkuutta todellisessa toimintapisteessä ja suosittelee hammasparia, jonka tehdas pystyy toimittamaan luettelon vakiotoimitusajassa. Vakioluettelon suhteet 5:1 - 100:1 ovat varastossa kaikkialla. yksi- ja monikäynnistysmadonvaihteet Moduuleille M1–M8 ja luettelon ulkopuolisille mittatilaussuhteille tehdään tilaus piirustuksia vastaan.
Tarvitseeko välityssuhteen ja moottorin koon tarkistusta?
Lähetä meille lähtömomenttisi, lähtökierroslukusi ja käyttösuhteesi. Suoritamme täyden laskelman, suosittelemme kokonaislukuhammasparia ja kerromme sinulle, minkä moottorin tehon laskutoimitukset todella vaativat – yleensä yhden korealaisen työpäivän kuluessa.
Toimittaja: Cxm


























