Übersetzungsverhältnis und Berechnung von Schneckengetrieben – Formeln, Beispiele, Anwendungsfälle
Die Arithmetik hinter einem Schneckengetriebe und einem Schneckenradpaar, drei durchgerechnete Beispiele und die Realität der ganzzahligen Zahnteilung, die die sauberen Lehrbuchverhältnisse zunichtemacht.
Das Schneckengetriebeübersetzungsverhältnis ergibt sich aus der Anzahl der Zähne des Schneckenrades geteilt durch die Anzahl der Schneckengänge: i = Z₂ / Z₁. Eine eingängige Schnecke, die in ein 40-zahniges Schneckenrad eingreift, ergibt ein Übersetzungsverhältnis von 40:1. Eine viergängige Schnecke auf demselben Schneckenrad ergibt ein Übersetzungsverhältnis von 10:1. Der Wirkungsgrad wird durch den Steigungswinkel und den Reibungswinkel gemäß η = tan(λ) / tan(λ + φ) bestimmt – typischerweise 60 bis 70 Prozent für eingängige Antriebe mit hoher Übersetzung und 85 bis 92 Prozent für mehrgängige Antriebe mit niedriger Übersetzung. Das erforderliche Eingangsdrehmoment entspricht dem Ausgangsdrehmoment geteilt durch (Übersetzungsverhältnis × Wirkungsgrad). Da die Zähnezahlen nicht ganzzahlig sind, entspricht das tatsächliche Übersetzungsverhältnis selten dem exakten Wert im Datenblatt.
Die beiden Formeln, zu denen jeder Schneckenantrieb zurückkehrt.
Vergessen Sie für einen Moment die langen Listen von Steigungs- und Modulgleichungen. Zwei Formeln bestimmen 90 Prozent der Konstruktionsentscheidungen bei einem Schneckengetriebe und einem Schneckenradpaar, und die meisten Berechnungsfehler in der Praxis resultieren aus der falschen Anwendung dieser beiden Formeln – nicht aus fortgeschrittener Geometrie.
Formel 1 — Reduktionsverhältnis (kinematisch)
i = Z₂ / Z₁
Dabei ist Z₁ die Anzahl der Schneckengänge (1, 2, 3, 4, manchmal 6) und Z₂ die Anzahl der Zähne des Schneckenrades. Dies ist reine Geometrie – Material und Schmierstoff spielen keine Rolle.
Formel 2 – Mechanischer Wirkungsgrad
η = tan(λ) / tan(λ + φ)
Dabei ist λ der Steigungswinkel der Schnecke (abhängig von der Anzahl der Schneckengänge und dem Teilkreisdurchmesser) und φ der Reibungswinkel des Kontakts (5 bis 8 Grad bei gut geschmiertem Stahl auf Bronze, 10 bis 15 Grad bei schlechter Schmierung). An dieser Stelle spielen Werkstoff, Oberflächenbeschaffenheit und Schmierstoffzusammensetzung eine wichtige Rolle.
Die Bedeutung dieser beiden Formeln liegt darin, dass sie den zentralen Zielkonflikt von Schneckengetrieben erfassen: Hohes Übersetzungsverhältnis bedeutet geringe Effizienz, niedriges Übersetzungsverhältnis bedeutet hohe Effizienz, und beides gleichzeitig ist nicht möglich. Die zweite Formel erklärt die versteckten Kosten der ersten.

Die Verhältnisformel richtig lesen
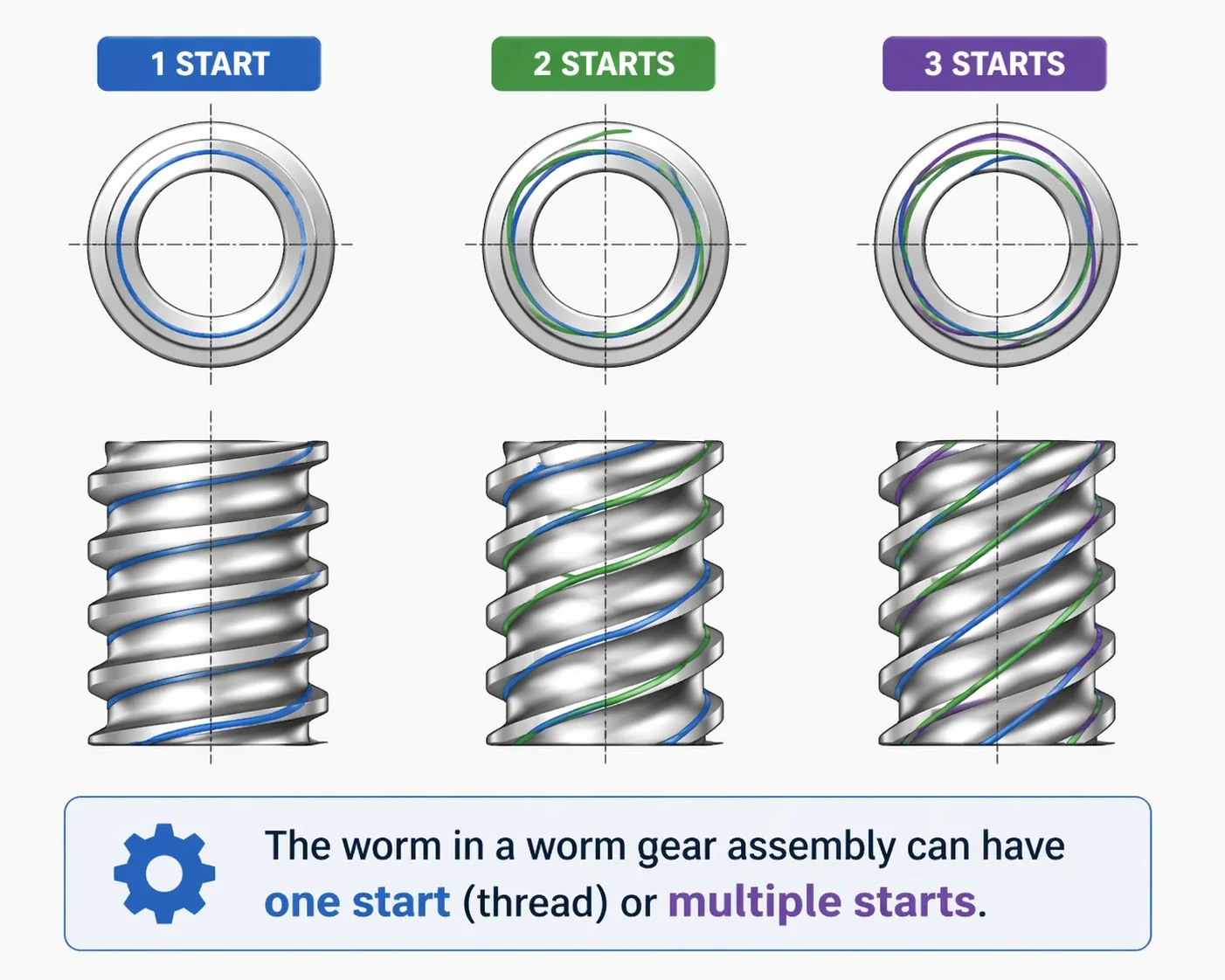
Z₁ zählt die Anzahl der spiralförmigen Gewindegänge auf der Schnecke – nicht die Gesamtzahl der an einer beliebigen Position im Umfang sichtbaren Gewindespitzen. Betrachten Sie die Schnecke von der Stirnseite. Eine eingängige Schnecke zeigt ein einzelnes Gewinde, das sich spiralförmig um die Welle windet. Eine zweigängige Schnecke zeigt zwei parallel verlaufende, um 180 Grad versetzte Gewindegänge. Eine viergängige Schnecke zeigt vier parallele Gewindegänge im Abstand von 90 Grad. Der visuelle Anhaltspunkt ist die Anzahl der einzelnen Gewindegänge, die Sie von einem Ende der Schnecke zum anderen verfolgen können.
Z₂ zählt die Zähne eines Rades auf herkömmliche Weise – die Gesamtzahl der Zähne entlang des Radumfangs. Ein Rad mit 40 Zähnen hat 40 Zähne. Die Zahl ist physikalisch bedingt eine ganze Zahl; 40,5 Zähne sind nicht möglich.
Die Ganzzahlfalle, die saubere Lehrbuchverhältnisse zunichtemacht
Sowohl Z₁ als auch Z₂ müssen ganze Zahlen sein, und diese Einschränkung ist wichtiger, als die meisten Rechner berücksichtigen. Fragt ein Kunde nach „exakt 35:1“, muss unsere Entwicklungsabteilung ihm mitteilen, dass er eines der drei nächstliegenden praktischen Verhältnisse erhält: Z₂ = 35 mit Z₁ = 1 ergibt exakt 35:1, Z₂ = 70 mit Z₁ = 2 ergibt ebenfalls exakt 35:1, oder Z₂ = 36 mit Z₁ = 1 ergibt 36:1 (eine Überschreitung von 2,9 Prozent). Die Wahl hängt von den weiteren Anforderungen der Anwendung ab: Z₂ = 35 ist für einen einstufigen Antrieb geeignet, Z₂ = 70 verdoppelt den Raddurchmesser bei gleichem Modul, und Z₂ = 36 stellt einen kleinen Kompromiss dar, der die Verwendung einer gängigeren Radgröße ermöglicht.
Die Anforderung von 35,5:1 ist schlichtweg nicht realisierbar – es gibt kein Zahlenpaar, das genau dieses Verhältnis liefert. Der im Konstruktionsplan angegebene Wert muss auf einen für die Fertigung realisierbaren Wert gerundet werden. Bei Anwendungen koreanischer und japanischer OEMs, bei denen nachgelagerte Encoder und Motorsteuerungen ein exaktes Übersetzungsverhältnis voraussetzen, muss diese Rundung bereits in der Konstruktionsphase erfolgen, nicht erst nach der Teilefertigung.
Wie sich Effizienz aus dem Vorhaltewinkel ergibt
Der Steigungswinkel λ ist der Winkel zwischen der Gewindesteigung einer Schnecke und einer Ebene, die senkrecht zur Schneckenachse steht. Bei einer eingängigen Schnecke mit kleinem Teilkreisdurchmesser beträgt λ etwa 3 bis 5 Grad. Bei einer viergängigen Schnecke mit gleichem Teilkreisdurchmesser und Modul steigt λ auf 15 bis 20 Grad. Der Zusammenhang ist geometrischer Natur: Mehr Windungen bei gleichem Modul bedeuten eine steilere Steigung.
Setzt man die Zahlenwerte in die Effizienzformel ein, wird der Kompromiss konkret. Angenommen, der Reibungswinkel φ = 6 Grad beträgt, was für gut geschmierten Stahl auf Phosphorbronze realistisch ist:
Die Form der Kennlinie ist entscheidend. Eine Erhöhung des Steigungswinkels von 3° auf 10° verdoppelt den Wirkungsgrad nahezu. Eine Erhöhung von 20° auf 30° bewirkt hingegen kaum eine Verbesserung. Der optimale Bereich für hocheffiziente Mehrfachanlaufgetriebe liegt bei einem Steigungswinkel von etwa 15 bis 20 Grad. Darüber hinaus nimmt der Nutzen ab, und die für die Wartung des Antriebs notwendige Schneckenradbreite verringert sich. Die meisten im Katalog erhältlichen Schneckengetriebe und Schneckenradpaare lassen sich in zwei Gruppen einteilen: 3 bis 5 Grad (hochübersetzte, selbsthemmende Getriebe) oder 12 bis 18 Grad (mittelübersetzte, wirkungsgradorientierte Getriebe).
Eine häufige Falle: Konstrukteure lesen „η = 70 Prozent“ aus dem Herstellerkatalog ab und behandeln diesen Wert als Konstante für die Motorauslegung. Das ist falsch. Die 70 Prozent beziehen sich auf den Nennwirkungsgrad bei Nennlast und Nenndrehzahl. Bei einem Zehntel der Last bleibt das Reibungsmoment im Getriebe annähernd konstant, während das nutzbare Drehmoment um den Faktor zehn sinkt – der gemessene Wirkungsgrad kann unter 30 Prozent fallen. Dimensionieren Sie den Motor immer anhand des tatsächlichen Betriebspunktes, nicht anhand der Nennleistung. Bei Teillastbetrieb sollten Sie für die Berechnung des Eingangsdrehmoments den Teillastwert und nicht den Katalogwert verwenden.
Beispiel 1 – Förderbandantrieb
Ein Flachbandförderer transportiert 80 kg Produkt mit einer Geschwindigkeit von 0,5 m/s auf einer 40 m langen Strecke. Die Antriebsscheibe hat einen Durchmesser von 200 mm. Der Kunde wünscht einen intermittierenden Betrieb (40 % Betrieb, 60 % Stillstand) und einen geräuscharmen Antrieb. Eine Selbsthemmung ist nicht erforderlich, da das Band horizontal verläuft.
Die folgende Schritt-für-Schritt-Anleitung zeigt alle Berechnungsschritte von der Bandkraft bis zur Motorauswahl. Das gleiche Verfahren eignet sich für jede Förderbandauslegung – lediglich die Eingangswerte ändern sich.

Beachten Sie die Rundungsentscheidung in Schritt 5: Das exakte arithmetische Verhältnis beträgt 29,4:1, das nächstliegende praktische Verhältnis für die Zähnezahl ist jedoch 30:1, was zu einer etwas geringeren Bandgeschwindigkeit führt. Der Kunde akzeptierte diesen Kompromiss, da am Förderbandausgang kein sichtbarer Unterschied festzustellen war. Dies ist bei Industrieantrieben üblich.
Ausgearbeitetes Beispiel 2 – Trommelantrieb für Hebezeuge

Ein kleiner Werkstattaufzug hebt Lasten bis zu 500 kg auf einer Trommel mit 100 mm Radius. Die Hubgeschwindigkeit beträgt 6 m/min. Eine Selbsthemmung ist zwingend erforderlich, da eine herabfallende Last ein Sicherheitsrisiko darstellen würde. Der Kunde wünscht den Einsatz eines handelsüblichen Drehstrommotors mit 1400 U/min.
Durch die Selbsthemmung entfallen mehrgängige Schneckengetriebe – wir sind gezwungen, eine eingängige Konstruktion mit niedrigem Steigungswinkel zu verwenden und den Effizienzverlust in Kauf zu nehmen.
Zwei Dinge fallen bei dieser Berechnung besonders auf. Erstens ist der Effizienzverlust durch die Selbsthemmung erheblich – etwa 67 Prozent der Eingangsleistung werden im Antrieb in Wärme umgewandelt. Zweitens ist der Leistungsbedarf des Motors (3 kW) deutlich höher als der, den die gleiche Last mit einem hocheffizienten Winkelgetriebe (etwa 1,5 kW) benötigen würde. Der Kunde bezahlt die Selbsthemmung über die gesamte Lebensdauer des Hebezeugs mit einem höheren Stromverbrauch. Für ein Werkstatthebezeug mit vielleicht 200 Betriebsstunden pro Jahr ist dieser Kompromiss akzeptabel. Für ein Produktionshebezeug, das 24 Stunden am Tag läuft, wäre er es nicht – hier wäre ein Winkelgetriebe mit separater mechanischer Bremse die richtige Lösung.
Durchgerechnetes Beispiel 3 – Teilrundtisch
Ein 4-Stationen-Rundtisch positioniert Schweißvorrichtungen für Automobil-Sitzgestelle. Jede Station trägt 12 kg, die Gesamtmasse des Tisches beträgt 80 kg, der Radius 400 mm. Die Indexierzeit pro Station beträgt 1,2 Sekunden (90°-Drehung). Das Haltemoment zwischen den Bewegungen muss ein versehentliches Anstoßen verhindern, der Antrieb selbst wird jedoch elektrisch durch eine Servobremse gehalten – eine Selbsthemmung ist wünschenswert, aber nicht zwingend erforderlich.
Diese Berechnung ist dynamisch, nicht statisch. Die dominierende Last ist die Beschleunigung der Tischmasse um 90 Grad in 1,2 Sekunden – das maximale Drehmoment tritt während der Beschleunigung auf, nicht während der gleichmäßigen Rotation. Servoanwendungen erfordern zudem ein geringeres Spiel als die Beispiele mit Förderbändern oder Hebezeugen.
Das Beschleunigungsprofil basiert auf einer dreieckigen Geschwindigkeitsrampe – die ersten 0,6 Sekunden Beschleunigung, die letzten 0,6 Sekunden Verzögerung. Die maximale Winkelgeschwindigkeit im Mittelpunkt beträgt 2 × 0,785 rad / 1,2 s = 1,31 rad/s. Die maximale Winkelbeschleunigung beträgt 1,31 / 0,6 = 2,18 rad/s².
Fazit: Dynamische Indexieranwendungen basieren auf dem Beschleunigungsdrehmoment, nicht auf dem Drehmoment im stationären Zustand. Das polare Trägheitsmoment des Tisches selbst ist oft größer als die Masse des Werkstücks, insbesondere bei schweren Stahldrehtischen. Die Servoauswahl muss das Spitzendrehmoment, nicht das mittlere Drehmoment, berücksichtigen – andernfalls ist dies der häufigste Grund für das Blockieren von Indexierprototypen im ersten Zyklus.
Häufige Berechnungsfehler, die Konstruktionen zerstören
Verwechslung von Z₁ und Z₂. Erstaunlich viele erste Entwürfe weisen vertauschte Schneckenanfänge und Radzähne auf – jemand hat die Radzahnzahl dort eingetragen, wo die Formel den Schneckenanfang erwartet. Das Ergebnis ist ein berechnetes Verhältnis von 1/40 statt 40, was die Rechnung absurd erscheinen lässt und die Konstruktion zum Scheitern bringt. Daher immer deutlich beschriften: Z₁ für die Schnecke, Z₂ für das Rad.
Vergessen, durch den Wirkungsgrad zu teilen. Das Grundverhältnis beschreibt die kinematische Beziehung zwischen Eingangs- und Ausgangsdrehzahl. Um daraus ein Drehmoment zu berechnen, muss durch den Wirkungsgrad dividiert werden. Lässt man den Wirkungsgrad außer Acht, wählt man einen viel zu kleinen Motor. Der Antrieb blockiert dann unter Nennlast. Eingangsdrehmoment = Ausgangsdrehmoment ÷ (Verhältnis × Wirkungsgrad), immer.
Effizienz wird als Konstante betrachtet. Der angegebene Wirkungsgrad bezieht sich auf die Nennlast. Der Wirkungsgrad bei Teillast ist deutlich geringer, da das Reibungsmoment im Getriebe annähernd konstant bleibt, während das nutzbare Drehmoment abnimmt. Verwenden Sie daher immer den Wirkungsgrad im Betriebspunkt, nicht den angegebenen Wert.
Statisches Drehmoment für dynamische Anwendungen nutzen. Teiltische, Hebezeuge mit Stoßbelastungen und alle Antriebe mit häufigen Start-Stopp-Zyklen müssen auf das maximale Beschleunigungsdrehmoment und nicht auf das Drehmoment im stationären Zustand ausgelegt werden. Das maximale Drehmoment kann je nach Zykluszeit das Zwei- bis Vierfache des stationären Wertes betragen.
Anforderungen an nicht-ganzzahlige Verhältnisse. Die Anforderung von 47,3:1 lässt sich nicht umsetzen. Runden Sie daher bereits in der Entwurfsphase auf das nächstliegende praktikable ganzzahlige Zahnverhältnis. Benötigt der nachgelagerte Regler ein exaktes Verhältnis, legen Sie zunächst das Übersetzungsverhältnis fest und lassen Sie die Reglerskalierung sich an das tatsächliche Verhältnis anpassen.
Der Servicefaktor wird außer Acht gelassen. Ein exakt auf das berechnete Nenndrehmoment ausgelegter Antrieb weist keinerlei Toleranz gegenüber Netzspannungsschwankungen, Alterung, gelegentlicher Überlastung oder Temperaturwechseln auf. Vor der Auswahl von Motor und Getriebe ist ein Betriebsfaktor zwischen 1,3 (leicht intermittierend) und 2,5 (stark stoßbelastet) zu berücksichtigen.
Häufig gestellte Fragen
F: Ist das Übersetzungsverhältnis dasselbe wie das Untersetzungsverhältnis?
Bei einem Schnecken-Schneckenrad-Gespann, bei dem die Schnecke den Antrieb übernimmt, gilt: Das Übersetzungsverhältnis i = Z₂/Z₁ entspricht der Drehzahluntersetzung. Die Abtriebswelle dreht sich einmal für jede i Umdrehungen der Antriebswelle. In seltenen Ausführungen, bei denen das Schneckenrad die Schnecke antreibt (z. B. bei rückwärtsantreibenden Mehrganggetrieben, die als Freilaufkupplungen verwendet werden), bleibt die Formel für das Übersetzungsverhältnis gleich, die kinematische Interpretation kehrt sich jedoch um. Die Kombination aus Schnecke und Schneckenrad ist der Standardfall und der einzige, der einer eindeutigen Behandlung bedarf.
F: Wie wird der Steigungswinkel aus den Schneckenabmessungen berechnet?
Der Steigungswinkel λ berechnet sich nach der Formel arctan(L / (π × d₁)), wobei L die Steigung (axialer Vorschub pro Umdrehung = Z₁ × axiale Teilung) und d₁ der Teilkreisdurchmesser der Schnecke ist. Bei einer eingängigen Schnecke mit axialer Teilung von 9,42 mm und Teilkreisdurchmesser von 36 mm gilt: L = 9,42 mm, π × d₁ = 113,1 mm, also λ = arctan(9,42/113,1) = 4,76°. Mehrgängige Schnecken haben eine proportional größere Steigung – eine zweigängige Schnecke mit gleicher Teilung und gleichem Durchmesser hätte beispielsweise einen Steigungswinkel von λ = arctan(18,84/113,1) = 9,46°.
F: Was ist ein typischer Reibungswinkel bei industriellen Schneckengetrieben?
Bei gut geschmiertem Stahl-Phosphorbronze-Getriebe mit synthetischem Getriebeöl beträgt der Reibungswinkel φ etwa 5 bis 7 Grad (μ = 0,087 bis 0,12). Bei Mineralöl und moderaten Temperaturen liegt er bei 7 bis 9 Grad. Bei mangelhafter Schmierung oder im Einlaufzustand beträgt er 10 bis 15 Grad. Die Gleitgeschwindigkeit beeinflusst die Reibung: Bei sehr niedrigen Geschwindigkeiten (unter 0,5 m/s) dominiert die Grenzschmierung, und φ steigt an; bei mittleren Geschwindigkeiten (1 bis 5 m/s) verringern hydrodynamische Effekte φ; bei sehr hohen Geschwindigkeiten führt die Erwärmung zu einem erneuten Anstieg von φ. Die meisten Industrierechner gehen zunächst von einem konstanten Wert von 6 Grad aus.
F: Wie erhalte ich ein exaktes, nicht standardmäßiges Verhältnis wie z. B. 50,5:1?
Das ist nicht möglich – nicht mit einer einzigen Schnecken- und Schneckenradstufe. Das Übersetzungsverhältnis Z₂/Z₁ muss ein Verhältnis ganzer Zahlen sein, und 50,5 = 10¹/², daher ist die einzige einstufige Lösung Z₁ = 2 und Z₂ = 10¹. Ein Schneckenrad mit 101 Zähnen ist zwar ungewöhnlich, aber herstellbar. Üblicherweise verwendet man zwei Stufen: eine Schneckenstufe mit einem Übersetzungsverhältnis von 50:1, gefolgt von einer kleinen Stirn- oder Planetenstufe zur Feinabstimmung des Gesamtübersetzungsverhältnisses. Zweistufige Antriebe erreichen zudem Übersetzungsverhältnisse über 200:1, die mit keinem praktischen einstufigen Schneckengetriebe sauber erreicht werden können.
F: Warum sind meine gemessenen Wirkungsgradwerte niedriger als die von der Formel vorhergesagten?
Die Formel η = tan(λ)/tan(λ+φ) gibt lediglich den Wirkungsgrad des Zahnradeingriffs an. Die vollständige Formel Schneckengetriebe Zusätzlich treten Lagerverluste, Reibungsverluste durch Öldichtungen und Ölverwirbelungsverluste auf, die in der Formel nicht berücksichtigt werden. Der Gesamtwirkungsgrad des Antriebs liegt typischerweise 5 bis 10 Prozentpunkte unter dem Verzahnungswirkungsgrad. Bei einem Aggregat mit einem prognostizierten Verzahnungswirkungsgrad von η_mesh = 70 Prozent ist mit einem Gesamtwirkungsgrad von etwa 60 bis 65 Prozent zu rechnen. Messwerte unterhalb der Formelberechnung sind normal und kein Anzeichen für Probleme.
F: Kann sich das Übersetzungsverhältnis eines Schneckengetriebes im Laufe der Zeit durch Verschleiß verändern?
Nein – das Übersetzungsverhältnis wird durch die Zähnezahl bestimmt und bleibt über die gesamte Lebensdauer der Baugruppe konstant. Was sich durch Verschleiß ändert, ist das Zahnflankenspiel (das geringe Rotationsspiel zwischen Schnecke und Rad unter Lastwechsel) und möglicherweise der Wirkungsgrad (aufgrund von veränderter Oberflächenrauheit und Schmierstoffbeschaffenheit). Das Übersetzungsverhältnis selbst ist geometrisch und unveränderlich, solange Zähne und Gewinde vorhanden sind.
F: Wie genau sind diese formelbasierten Effizienzprognosen?
Für die erste Dimensionierung liefern Formelberechnungen bei realistischem Reibungswinkel eine Genauigkeit von ±5 Prozentpunkten. Für die endgültige Motorauswahl in kritischen Anwendungen sollten Sie Prüfstandsdaten vom Lieferanten anfordern – die meisten renommierten Hersteller, einschließlich unseres, können gemessene Wirkungsgradkurven für verschiedene Last- und Drehzahlbereiche bereitstellen. Die Formel ist das richtige Werkzeug für die frühe Entwurfsphase; Prüfstandsdaten sind das richtige Werkzeug für die endgültige Entscheidung.
Die Berechnung eines Schneckengetriebes mit Schneckenrad ist zwar einfach, aber fehleranfällig. Ein Fehler in der grundlegenden Übersetzungsformel führt sofort zu Rechenfehlern. Eine falsche Wirkungsgradberechnung kann dazu führen, dass das Getriebe ausgeliefert wird, überhitzt, die Garantie erlischt und der Fehler monatelang unentdeckt bleibt, bis die Reklamationen eingehen. Die beiden Formeln am Anfang dieses Artikels enthalten im Wesentlichen alle notwendigen Informationen – sie müssen lediglich am tatsächlichen Betriebspunkt mit realistischen Reibungswerten und auf ganzzahlige Zähnezahlen gerundet angewendet werden, die der Hersteller auch tatsächlich produzieren kann.
Für koreanische und japanische OEM-Entwicklungsteams, die eine Berechnung überprüfen lassen möchten, bevor sie sich auf Motor- und Übersetzungsverhältnisse festlegen, bietet unsere Entwicklungsabteilung einen entsprechenden Service an. Überprüfung der Berechnung des Schneckengetriebeverhältnisses Anhand Ihres Betriebszyklus ermittelt das Unternehmen einen realistischen Wirkungsgrad am tatsächlichen Betriebspunkt und empfiehlt ein Zahnradpaar, das das Werk innerhalb der üblichen Kataloglieferzeit liefern kann. Standardübersetzungen von 5:1 bis 100:1 sind in unserem Lager vorrätig. ein- und mehrgängige Schneckengetriebe Die Module M1 bis M8 sowie kundenspezifische Übersetzungen außerhalb des Katalogbereichs werden auf Bestellung nach Zeichnung gefertigt.
Brauchen Sie eine Plausibilitätsprüfung Ihrer Übersetzungsverhältnisse und Motordimensionierung?
Senden Sie uns Ihr Drehmoment, Ihre Drehzahl und Ihren Tastgrad. Wir führen die vollständige Berechnung durch, empfehlen Ihnen ein passendes Zähnepaar und teilen Ihnen die benötigte Motorleistung mit – in der Regel innerhalb eines koreanischen Werktags.
Herausgeber: Cxm


























