อัตราทดเกียร์หนอนและการคำนวณ — สูตร ตัวอย่าง และกรณีศึกษาจริง
หลักการคำนวณเบื้องหลังเฟืองตัวหนอนและเฟืองล้อหนอน ตัวอย่างการคำนวณสามตัวอย่าง และความเป็นจริงของจำนวนฟันเฟืองที่เป็นจำนวนเต็มซึ่งทำให้สัดส่วนที่ชัดเจนในตำราเรียนนั้นผิดพลาดไป
อัตราทดเกียร์หนอนคือจำนวนฟันของล้อหารด้วยจำนวนการเริ่มต้นของหนอน: i = Z₂ / Z₁ หนอนเริ่มต้นเดียวที่ขบกับล้อ 40 ฟันจะให้อัตราทด 40:1 หนอนเริ่มต้น 4 ตัวบนล้อเดียวกันจะให้อัตราทด 10:1 ประสิทธิภาพขึ้นอยู่กับมุมนำและมุมเสียดทานผ่าน η = tan(λ) / tan(λ + φ) — โดยทั่วไปจะอยู่ที่ 60 ถึง 70 เปอร์เซ็นต์สำหรับระบบขับเคลื่อนเริ่มต้นเดียวที่มีอัตราทดสูง และ 85 ถึง 92 เปอร์เซ็นต์สำหรับระบบขับเคลื่อนหลายเริ่มต้นที่มีอัตราทดต่ำ แรงบิดขาเข้าที่ต้องการเท่ากับแรงบิดขาออกหารด้วย (อัตราทด × ประสิทธิภาพ) และจำนวนฟันที่เป็นจำนวนเต็มหมายความว่าอัตราทดที่คุณได้รับจริงนั้นแทบจะไม่ตรงกับตัวเลขที่คุณพิมพ์ลงในเอกสารข้อมูลจำเพาะเลย
สูตรสองอย่างที่เป็นหัวใจสำคัญของเฟืองตัวหนอนทุกตัว
ลืมรายการสมการระยะห่างและโมดูลที่ยาวเหยียดไปก่อนสักครู่ มีเพียงสองสูตรเท่านั้นที่กำหนดการตัดสินใจด้านการออกแบบถึง 90 เปอร์เซ็นต์ของชุดเฟืองตัวหนอนและล้อเฟืองตัวหนอน และข้อผิดพลาดในการคำนวณส่วนใหญ่ในภาคสนามมาจากการนำสองสูตรนี้ไปใช้ผิดวิธี ไม่ใช่จากเรขาคณิตขั้นสูง
สูตรที่ 1 — อัตราส่วนลด (จลศาสตร์)
i = Z₂ / Z₁
โดยที่ Z₁ คือจำนวนจุดเริ่มต้นของตัวหนอน (1, 2, 3, 4 หรือบางครั้ง 6) และ Z₂ คือจำนวนฟันของล้อ นี่เป็นเพียงเรขาคณิตล้วนๆ วัสดุและสารหล่อลื่นไม่ได้เข้ามาเกี่ยวข้องในสมการนี้
สูตรที่ 2 — ประสิทธิภาพเชิงกล
η = tan(λ) / tan(λ + φ)
โดยที่ λ คือมุมนำของตัวหนอน (ซึ่งเป็นฟังก์ชันของจำนวนสตาร์ทและเส้นผ่านศูนย์กลางของเกลียวตัวหนอน) และ φ คือมุมเสียดทานของหน้าสัมผัส (5 ถึง 8 องศาสำหรับเหล็กบนทองสัมฤทธิ์ที่มีการหล่อลื่นอย่างดี และ 10 ถึง 15 องศาสำหรับการหล่อลื่นที่ไม่ดี) นี่คือจุดที่วัสดุ การตกแต่งพื้นผิว และองค์ประกอบทางเคมีของสารหล่อลื่นเข้ามามีบทบาท
เหตุผลที่สูตรทั้งสองนี้มีความสำคัญมากก็คือ สูตรเหล่านี้แสดงให้เห็นถึงข้อแลกเปลี่ยนที่สำคัญของระบบเฟืองตัวหนอน นั่นคือ อัตราทดสูงหมายถึงประสิทธิภาพต่ำ อัตราทดต่ำหมายถึงประสิทธิภาพสูง และคุณไม่สามารถมีทั้งสองอย่างในชุดเดียวกันได้ สูตรที่สองอธิบายถึงต้นทุนแฝงของสูตรแรก

การอ่านสูตรอัตราส่วนอย่างถูกต้อง
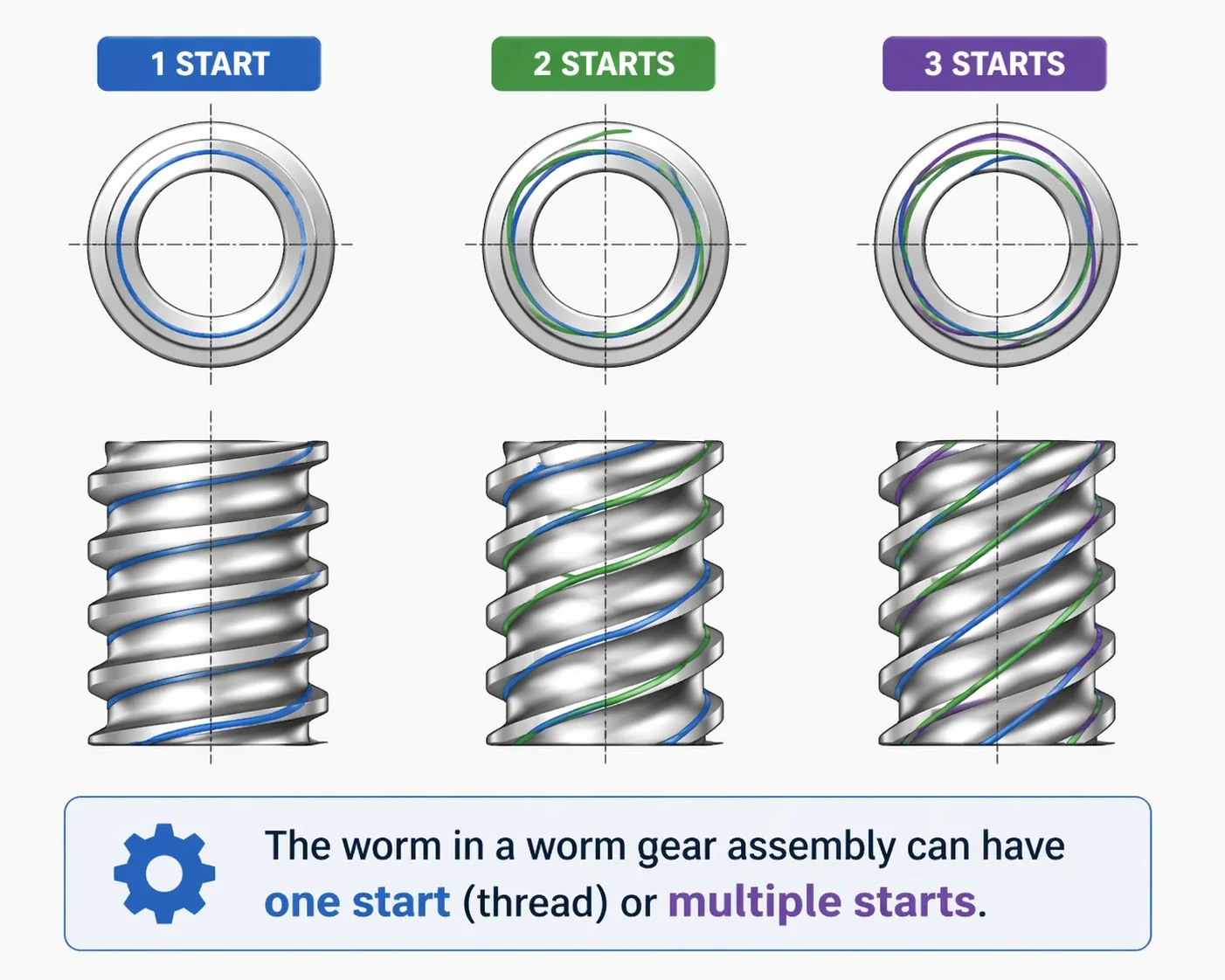
Z₁ นับจำนวนเกลียวเริ่มต้นบนตัวหนอน ไม่ใช่จำนวนยอดเกลียวทั้งหมดที่มองเห็นได้ในตำแหน่งใดตำแหน่งหนึ่งตามแนวเส้นรอบวง ลองมองที่ปลายตัวหนอนจากด้านหน้า หนอนแบบเกลียวเริ่มต้นเดียวจะแสดงเกลียวหนึ่งเส้นที่หมุนวนลงมาตามแกน หนอนแบบเกลียวสองเริ่มต้นจะแสดงเกลียวสองเส้นที่พันขนานกัน โดยเยื้องไป 180 องศา หนอนแบบเกลียวสี่เริ่มต้นจะแสดงเกลียวสี่เส้นที่ขนานกัน โดยเว้นระยะห่าง 90 องศา สิ่งสำคัญคือจำนวนเกลียวที่แยกจากกันที่คุณสามารถติดตามได้จากปลายด้านหนึ่งของหนอนไปยังอีกด้านหนึ่ง
Z₂ นับจำนวนฟันล้อด้วยวิธีแบบดั้งเดิม คือนับจำนวนฟันทั้งหมดรอบเส้นรอบวงของล้อ ล้อ 40 ฟันก็จะมี 40 ฟัน จำนวนนี้ต้องเป็นจำนวนเต็มตามหลักการทางฟิสิกส์ คุณไม่สามารถมีฟัน 40.5 ซี่ได้
กับดักจำนวนเต็มที่ทำลายอัตราส่วนที่ถูกต้องตามตำราเรียน
ทั้ง Z₁ และ Z₂ ต้องเป็นจำนวนเต็ม และข้อจำกัดนี้มีความสำคัญมากกว่าที่เครื่องคิดเลขส่วนใหญ่รับรู้ หากลูกค้าขอ "อัตราส่วน 35:1 พอดี" ฝ่ายวิศวกรรมของเราต้องแจ้งให้พวกเขาทราบว่าพวกเขาจะได้อัตราส่วนที่ใกล้เคียงที่สุดที่เป็นไปได้ 3 ค่า ได้แก่ Z₂ = 35 โดยที่ Z₁ = 1 จะได้อัตราส่วน 35:1 พอดี, Z₂ = 70 โดยที่ Z₁ = 2 จะได้อัตราส่วน 35:1 พอดี หรือ Z₂ = 36 โดยที่ Z₁ = 1 จะได้อัตราส่วน 36:1 (เกินไป 2.9 เปอร์เซ็นต์) การเลือกขึ้นอยู่กับความต้องการของแอปพลิเคชันอื่นๆ — Z₂ = 35 เหมาะสำหรับไดรฟ์แบบสตาร์ทครั้งเดียว, Z₂ = 70 จะเพิ่มเส้นผ่านศูนย์กลางล้อเป็นสองเท่าในโมดูลเดียวกัน และ Z₂ = 36 เป็นค่าประนีประนอมเล็กน้อยที่ช่วยให้คุณใช้ขนาดล้อที่พบได้ทั่วไปมากขึ้น
การขออัตราส่วน 35.5:1 นั้นเป็นไปไม่ได้ เพราะไม่มีคู่จำนวนเต็มใดที่ให้ค่าอัตราส่วนนั้นได้อย่างแม่นยำ ตัวเลขที่ปรากฏในแบบร่างจะต้องปัดเศษให้เป็นค่าที่โรงงานสามารถตัดได้จริง สำหรับการใช้งาน OEM ในเกาหลีและญี่ปุ่น ซึ่งตัวเข้ารหัสและตัวควบคุมมอเตอร์ในขั้นตอนถัดไปจะถือว่ามีอัตราส่วนเกียร์ที่แน่นอน การปัดเศษนี้จะต้องเกิดขึ้นในขั้นตอนการออกแบบ ไม่ใช่หลังจากผลิตชิ้นส่วนเสร็จแล้ว
ประสิทธิภาพเกิดจากมุมนำอย่างไร
มุมนำ λ คือมุมระหว่างเกลียวของตัวหนอนกับระนาบที่ตั้งฉากกับแกนของตัวหนอน สำหรับตัวหนอนแบบเกลียวเดี่ยวที่มีเส้นผ่านศูนย์กลางพิทช์เล็ก λ อาจอยู่ที่ 3 ถึง 5 องศา สำหรับตัวหนอนแบบ 4 เกลียวที่มีเส้นผ่านศูนย์กลางพิทช์และโมดูลเดียวกัน λ จะเพิ่มขึ้นเป็น 15 ถึง 20 องศา ความสัมพันธ์นี้เป็นไปตามหลักเรขาคณิต กล่าวคือ จำนวนเกลียวที่มากขึ้นในโมดูลเดียวกันหมายถึงเกลียวที่ชันขึ้น
แทนค่าตัวเลขลงในสูตรประสิทธิภาพ แล้วคุณจะเห็นข้อแลกเปลี่ยนที่ชัดเจน สมมติว่ามุมเสียดทาน φ = 6 องศา ซึ่งเป็นค่าที่สมจริงสำหรับเหล็กบนฟอสเฟอร์บรอนซ์ที่หล่อลื่นอย่างดี:
รูปทรงของเส้นโค้งมีความสำคัญ การเพิ่มมุมนำจาก 3° เป็น 10° จะช่วยเพิ่มประสิทธิภาพได้เกือบสองเท่า การเพิ่มจาก 20° เป็น 30° แทบจะไม่เปลี่ยนแปลงเลย จุดที่เหมาะสมที่สุดสำหรับไดรฟ์แบบหลายสตาร์ทที่มีประสิทธิภาพสูงจะอยู่ที่ประมาณ 15 ถึง 20 องศาของมุมนำ — หากเกินกว่านั้น ผลตอบแทนจะลดลง และคุณจะเริ่มสูญเสียความกว้างของหน้าล้อที่ทำให้ไดรฟ์ใช้งานได้ เฟืองตัวหนอนและล้อเฟืองตัวหนอนส่วนใหญ่ในแคตตาล็อกจะแบ่งออกเป็นสองกลุ่ม: 3 ถึง 5 องศา (อัตราส่วนสูงแบบล็อคตัวเอง) หรือ 12 ถึง 18 องศา (อัตราส่วนปานกลางแบบเน้นประสิทธิภาพ)
ข้อผิดพลาดที่ผมเห็นบ่อยๆ คือ นักออกแบบอ่านค่า “η = 70 เปอร์เซ็นต์” จากแคตตาล็อกของผู้ผลิต แล้วนำมาใช้เป็นค่าคงที่ในการเลือกขนาดมอเตอร์ ซึ่งไม่ใช่ ตัวเลข 70 เปอร์เซ็นต์นั้นคือประสิทธิภาพที่ระบุไว้ที่โหลดและรอบความเร็วที่กำหนด ที่โหลดหนึ่งในสิบ แรงบิดเสียดทานภายในเกียร์จะคงที่โดยประมาณ ในขณะที่แรงบิดที่ใช้งานได้จะลดลงสิบเปอร์เซ็นต์ ประสิทธิภาพที่วัดได้อาจต่ำกว่า 30 เปอร์เซ็นต์ ควรเลือกขนาดมอเตอร์ตามจุดการทำงานจริง ไม่ใช่ตามที่ระบุบนแผ่นป้าย หากคุณใช้งานที่โหลดเบาๆ ในรอบการทำงาน ค่าเปอร์เซ็นต์ที่คุณควรนำไปใช้ในการคำนวณแรงบิดขาเข้าคือค่าที่โหลดบางส่วน ไม่ใช่ค่าที่ระบุในแคตตาล็อก
ตัวอย่างที่ 1 — ระบบขับเคลื่อนสายพานลำเลียง
สายพานลำเลียงแบบแบนลำเลียงผลิตภัณฑ์หนัก 80 กิโลกรัมด้วยความเร็ว 0.5 เมตร/วินาที ไปตามสายยาว 40 เมตร รอกขับมีเส้นผ่านศูนย์กลาง 200 มิลลิเมตร ลูกค้าต้องการการทำงานแบบไม่ต่อเนื่อง (ทำงาน 40 เปอร์เซ็นต์ หยุด 60 เปอร์เซ็นต์) และการขับเคลื่อนที่เงียบ ไม่จำเป็นต้องใช้ระบบล็อคอัตโนมัติเนื่องจากสายพานอยู่ในแนวนอน
ขั้นตอนการคำนวณด้านล่างแสดงทุกขั้นตอนทางคณิตศาสตร์ ตั้งแต่แรงดึงของสายพานไปจนถึงการเลือกมอเตอร์ ขั้นตอนเดียวกันนี้สามารถใช้ได้กับการคำนวณขนาดสายพานลำเลียงทุกแบบ สิ่งเดียวที่เปลี่ยนแปลงคือตัวเลขที่ป้อนเข้าไป

โปรดสังเกตการปัดเศษในขั้นตอนที่ 5 — อัตราส่วนทางคณิตศาสตร์ที่แน่นอนคือ 29.4:1 แต่ค่าอัตราส่วนจำนวนเต็มที่ใกล้เคียงที่สุดที่ใช้งานได้จริงคือ 30:1 ซึ่งทำให้ความเร็วของสายพานช้าลงเล็กน้อย ลูกค้ายอมรับข้อตกลงนี้โดยไม่เห็นความแตกต่างที่ชัดเจนที่ปลายทางของสายพานลำเลียง นี่เป็นเรื่องปกติสำหรับไดรฟ์อุตสาหกรรม
ตัวอย่างการใช้งานที่ 2 — ระบบขับเคลื่อนดรัมยก

รอกยกของขนาดเล็กสำหรับโรงงาน สามารถยกน้ำหนักได้สูงสุด 500 กิโลกรัม บนดรัมที่มีรัศมี 100 มิลลิเมตร ความเร็วในการยกกำหนดไว้ที่ 6 เมตร/นาที ระบบล็อคอัตโนมัติเป็นสิ่งจำเป็น เนื่องจากหากน้ำหนักตกจะก่อให้เกิดอันตรายต่อความปลอดภัย ลูกค้าต้องการใช้มอเตอร์สามเฟสมาตรฐานขนาด 1,400 รอบต่อนาที
การล็อกตัวเองช่วยขจัดปัญหาหนอนที่ต้องเริ่มหลายรอบ – เราจึงถูกบังคับให้ใช้การออกแบบที่เริ่มเพียงรอบเดียวด้วยมุมนำต่ำ โดยยอมรับข้อเสียด้านประสิทธิภาพที่เกิดขึ้น
จากการคำนวณนี้ มีสองประเด็นที่โดดเด่น ประการแรก ประสิทธิภาพที่ลดลงจากการล็อกตัวเองนั้นค่อนข้างมาก โดยประมาณ 67 เปอร์เซ็นต์ของพลังงานที่ป้อนเข้าไปจะกลายเป็นความร้อนในระบบขับเคลื่อน ประการที่สอง กำลังไฟฟ้าที่ต้องการของมอเตอร์ (3 กิโลวัตต์) สูงกว่ามากเมื่อเทียบกับโหลดเดียวกันที่ต้องการในชุดเกียร์ทดรอบแบบเกลียวประสิทธิภาพสูง (อาจจะประมาณ 1.5 กิโลวัตต์) ลูกค้าต้องจ่ายค่าไฟฟ้าเพิ่มขึ้นสำหรับการล็อกตัวเองตลอดอายุการใช้งานของรอก สำหรับรอกในโรงงานที่ใช้งานประมาณ 200 ชั่วโมงต่อปี การแลกเปลี่ยนนี้อาจยอมรับได้ แต่สำหรับรอกในสายการผลิตที่ใช้งานตลอด 24 ชั่วโมงนั้นไม่เหมาะสม คำตอบที่ถูกต้องคือ ชุดเกียร์ทดรอบแบบเกลียวบวกกับเบรกเชิงกลแยกต่างหาก
ตัวอย่างที่ 3 — การจัดตำแหน่งโต๊ะหมุน
โต๊ะหมุนแบบ 4 สถานี ใช้สำหรับจัดตำแหน่งอุปกรณ์จับยึดสำหรับการเชื่อมโครงเบาะรถยนต์ แต่ละสถานีรับน้ำหนักได้ 12 กก. น้ำหนักรวมของโต๊ะ 80 กก. รัศมีโต๊ะ 400 มม. เวลาในการหมุนแต่ละสถานีคือ 1.2 วินาที (หมุน 90 องศา) แรงบิดในการยึดระหว่างการเคลื่อนที่ต้องต้านทานการกระแทกโดยไม่ตั้งใจ แต่ตัวขับเคลื่อนนั้นถูกยึดด้วยเบรกเซอร์โวไฟฟ้า – การล็อคตัวเองเป็นสิ่งที่พึงปรารถนาแต่ไม่จำเป็น
การคำนวณนี้เป็นแบบไดนามิก ไม่ใช่แบบคงที่ แรงหลักคือการเร่งความเร็วของมวลโต๊ะผ่าน 90 องศาใน 1.2 วินาที — แรงบิดสูงสุดเกิดขึ้นระหว่างการเร่งความเร็ว ไม่ใช่ระหว่างการหมุนคงที่ การใช้งานเซอร์โวยังต้องการระยะคลายตัวที่ต่ำกว่าตัวอย่างสายพานลำเลียงหรือรอกด้วย
กราฟแสดงความเร่งสมมติว่าความเร็วมีลักษณะเป็นรูปสามเหลี่ยม กล่าวคือ 0.6 วินาทีแรกเร่งความเร็ว และ 0.6 วินาทีสุดท้ายลดความเร็ว ความเร็วเชิงมุมสูงสุดที่จุดกึ่งกลางคือ 2 × 0.785 เรเดียน / 1.2 วินาที = 1.31 เรเดียน/วินาที ความเร่งเชิงมุมสูงสุดคือ 1.31 / 0.6 = 2.18 เรเดียน/วินาที²
ข้อสรุป: แอปพลิเคชันการจัดตำแหน่งแบบไดนามิกขับเคลื่อนการคำนวณผ่านแรงบิดจากการเร่งความเร็ว ไม่ใช่แรงบิดในสภาวะคงที่ โมเมนต์ความเฉื่อยเชิงขั้วของโต๊ะเองมักมีอิทธิพลเหนือมวลของชิ้นงาน โดยเฉพาะอย่างยิ่งในโต๊ะหมุนเหล็กหนัก การเลือกเซอร์โวต้องตอบสนองแรงบิดสูงสุด ไม่ใช่แรงบิดเฉลี่ย — หากไม่เป็นเช่นนั้น นี่คือสาเหตุที่พบบ่อยที่สุดที่ทำให้ต้นแบบการจัดตำแหน่งหยุดชะงักในรอบแรก
ข้อผิดพลาดในการคำนวณทั่วไปที่ทำให้การออกแบบล้มเหลว
สับสนระหว่าง Z₁ และ Z₂ น่าประหลาดใจที่แบบร่างแรกๆ จำนวนมากมีการสลับตำแหน่งของฟันเฟืองตัวหนอนและฟันเฟืองล้อ – บางคนเขียนจำนวนฟันเฟืองล้อในตำแหน่งที่สูตรคาดหวังว่าจะเป็นฟันเฟืองตัวหนอน ผลลัพธ์ที่ได้คืออัตราส่วนที่คำนวณได้ 1/40 แทนที่จะเป็น 40 ซึ่งทำให้การคำนวณดูไม่สมเหตุสมผลและทำให้การออกแบบหยุดชะงัก ควรระบุให้ชัดเจนเสมอ: Z₁ สำหรับเฟืองตัวหนอน, Z₂ สำหรับเฟืองล้อ
ลืมหารด้วยประสิทธิภาพ อัตราส่วนพื้นฐานแสดงความสัมพันธ์เชิงจลศาสตร์ระหว่างความเร็วอินพุตและความเร็วเอาต์พุต การแปลงความสัมพันธ์นั้นไปเป็นแรงบิดจำเป็นต้องหารด้วยประสิทธิภาพ หากไม่คำนึงถึงตัวหารประสิทธิภาพ คุณจะเลือกมอเตอร์ที่มีขนาดเล็กเกินไป มอเตอร์จะหยุดทำงานภายใต้ภาระปกติ แรงบิดอินพุต = แรงบิดเอาต์พุต ÷ (อัตราส่วน × ประสิทธิภาพ) เสมอ
โดยถือว่าประสิทธิภาพเป็นค่าคงที่ ประสิทธิภาพที่ระบุไว้ในเอกสารนั้นเป็นประสิทธิภาพที่โหลดสูงสุด ประสิทธิภาพที่โหลดต่ำจะต่ำกว่ามาก เนื่องจากแรงบิดเสียดทานภายในเกียร์ยังคงที่โดยประมาณ ในขณะที่แรงบิดที่ใช้งานได้ลดลง ควรใช้ประสิทธิภาพที่จุดใช้งานจริงเสมอ ไม่ใช่ตัวเลขที่ระบุไว้ในหัวข้อข่าว
การใช้แรงบิดคงที่สำหรับงานที่ต้องการแรงบิดแบบไดนามิก โต๊ะหมุน, รอกยกที่มีแรงกระแทก และระบบขับเคลื่อนใดๆ ที่มีการเริ่มและหยุดทำงานบ่อยครั้ง ต้องออกแบบขนาดให้เหมาะสมกับแรงบิดสูงสุดขณะเร่งความเร็ว ไม่ใช่แรงบิดขณะคงที่ แรงบิดสูงสุดอาจมากกว่าค่าคงที่ 2 ถึง 4 เท่า ขึ้นอยู่กับเวลาในการทำงานแต่ละรอบ
ต้องการอัตราส่วนที่ไม่ใช่จำนวนเต็ม การขออัตราส่วน 47.3:1 นั้นเป็นไปไม่ได้ ควรปัดเศษให้เป็นอัตราส่วนจำนวนฟันเฟืองที่เป็นจำนวนเต็มที่ใกล้เคียงที่สุดเท่าที่จะเป็นไปได้ในขั้นตอนการออกแบบ หากตัวควบคุมปลายทางต้องการอัตราส่วนที่แน่นอน ควรออกแบบอัตราส่วนเกียร์ก่อน แล้วปล่อยให้การปรับขนาดของตัวควบคุมปรับตามอัตราส่วนจริง
ลืมปัจจัยด้านการบริการไป มอเตอร์ที่ออกแบบให้มีขนาดพอดีกับแรงบิดที่คำนวณได้นั้น จะไม่มีระยะเผื่อสำหรับความผันผวนของแรงดันไฟฟ้า การเสื่อมสภาพตามอายุ การโอเวอร์โหลดเป็นครั้งคราว หรือการเปลี่ยนแปลงอุณหภูมิ ควรใช้ค่าตัวประกอบการใช้งานระหว่าง 1.3 (ใช้งานเบาเป็นช่วงๆ) ถึง 2.5 (ใช้งานหนักและมีแรงกระแทกสูง) ก่อนเลือกมอเตอร์และชุดเกียร์
คำถามที่พบบ่อย
ถาม: อัตราทดเกียร์กับอัตราส่วนลดเกียร์เหมือนกันหรือไม่?
สำหรับเฟืองตัวหนอนและล้อเฟืองตัวหนอน โดยที่ตัวหนอนเป็นตัวขับ ใช่แล้ว — อัตราทดเกียร์ i = Z₂/Z₁ เท่ากับอัตราส่วนลดความเร็ว เพลาส่งออกจะหมุนหนึ่งรอบต่อการหมุน i รอบของเพลานำเข้า ในรูปแบบที่หายากซึ่งล้อเป็นตัวขับตัวหนอน (การออกแบบแบบหลายรอบที่สามารถขับย้อนกลับได้ซึ่งใช้เป็นคลัตช์แบบโอเวอร์รันนิ่ง) สูตรอัตราทดเกียร์จะยังคงเหมือนเดิม แต่การตีความทางจลศาสตร์จะกลับกัน เฟืองตัวหนอนขับล้อเป็นกรณีมาตรฐานและเป็นกรณีเดียวที่ต้องการการอธิบายที่ชัดเจน
ถาม: มุมนำ (lead angle) คำนวณจากขนาดของตัวหนอน (worm dimensions) ได้อย่างไร?
มุมนำ λ = arctan( L / (π × d₁) ) โดยที่ L คือระยะนำ (ระยะการเคลื่อนที่ตามแนวแกนต่อรอบ = Z₁ × ระยะพิทช์ตามแนวแกน) และ d₁ คือเส้นผ่านศูนย์กลางของเกลียวตัวหนอน สำหรับเกลียวตัวหนอนแบบ 1 ขั้น ที่มีระยะพิทช์ตามแนวแกน 9.42 มม. และเส้นผ่านศูนย์กลาง 36 มม.: L = 9.42 มม., π × d₁ = 113.1 มม. ดังนั้น λ = arctan(9.42/113.1) = 4.76° เกลียวตัวหนอนแบบหลายขั้นจะมีมุมนำที่ใหญ่กว่าตามสัดส่วน — เกลียวตัวหนอนแบบ 2 ขั้น ที่มีระยะพิทช์และเส้นผ่านศูนย์กลางเท่ากัน จะมี λ = arctan(18.84/113.1) = 9.46°
ถาม: โดยทั่วไปแล้ว มุมเสียดทานของชุดเฟืองตัวหนอนในอุตสาหกรรมมีค่าเท่าไร?
สำหรับเหล็กบนฟอสเฟอร์บรอนซ์ที่หล่อลื่นอย่างดีด้วยน้ำมันเกียร์สังเคราะห์ มุมเสียดทาน φ จะอยู่ที่ประมาณ 5 ถึง 7 องศา (μ = 0.087 ถึง 0.12) สำหรับน้ำมันแร่ที่อุณหภูมิปานกลาง จะอยู่ที่ 7 ถึง 9 องศา สำหรับสภาวะการหล่อลื่นไม่ดีหรือช่วงการใช้งานเริ่มต้น จะอยู่ที่ 10 ถึง 15 องศา ความเร็วในการเลื่อนมีผลต่อแรงเสียดทาน: ที่ความเร็วต่ำมาก (ต่ำกว่า 0.5 ม./วินาที) การหล่อลื่นตามขอบเขตจะเด่นกว่าและ φ จะค่อยๆ เพิ่มขึ้น ที่ความเร็วปานกลาง (1 ถึง 5 ม./วินาที) ผลกระทบทางอุทกพลศาสตร์จะดึง φ ลง ที่ความเร็วสูงมาก ความร้อนจะเริ่มผลักดันให้ φ เพิ่มขึ้นอีกครั้ง เครื่องคำนวณทางอุตสาหกรรมส่วนใหญ่จะถือว่าค่าคงที่ 6 องศาเป็นค่าประมาณเบื้องต้น
ถาม: ฉันจะหาอัตราส่วนที่ไม่เป็นมาตรฐานที่แน่นอน เช่น 50.5:1 ได้อย่างไร?
คุณไม่สามารถทำได้ — จากชุดเฟืองตัวหนอนและล้อเฟืองตัวหนอนเพียงชุดเดียว อัตราส่วน Z₂/Z₁ ต้องเป็นอัตราส่วนของจำนวนเต็ม และ 50.5 = 101/2 ดังนั้นวิธีแก้ปัญหาแบบชุดเดียวจึงมีเพียง Z₁ = 2, Z₂ = 101 ล้อเฟือง 101 ฟันนั้นหายากแต่สามารถผลิตได้ วิธีที่นิยมมากกว่าคือการใช้สองชุด: ชุดเฟืองตัวหนอนอัตราส่วน 50:1 ตามด้วยชุดเฟืองเดือยหรือเฟืองดาวเคราะห์ขนาดเล็กเพื่อปรับอัตราส่วนโดยรวมให้ละเอียดขึ้น ระบบขับเคลื่อนสองชุดยังสามารถให้อัตราส่วนที่สูงกว่า 200:1 ซึ่งชุดเฟืองตัวหนอนแบบชุดเดียวที่ใช้งานได้จริงไม่สามารถทำได้อย่างสมบูรณ์แบบ
ถาม: เหตุใดค่าประสิทธิภาพที่วัดได้จึงต่ำกว่าที่สูตรคำนวณไว้?
สูตร η = tan(λ)/tan(λ+φ) ให้ค่าประสิทธิภาพการประกบเฟืองเท่านั้น สูตรที่สมบูรณ์จะให้ค่าประสิทธิภาพการประกบเฟืองเท่านั้น เกียร์ทดรอบแบบหนอน นอกจากนี้ยังมีการสูญเสียจากแบริ่ง แรงเสียดทานของซีลน้ำมัน และการสูญเสียจากการกวนน้ำมัน ซึ่งไม่ได้รวมอยู่ในสูตร ประสิทธิภาพการขับเคลื่อนโดยรวมมักจะต่ำกว่าค่าที่ได้จากการคำนวณอัตราทดเกียร์ประมาณ 5 ถึง 10 เปอร์เซ็นต์ สำหรับหน่วยที่มีค่า η_mesh ที่คาดการณ์ไว้เท่ากับ 70 เปอร์เซ็นต์ คาดว่าประสิทธิภาพการขับเคลื่อนโดยรวมจะอยู่ที่ประมาณ 60 ถึง 65 เปอร์เซ็นต์ ตัวเลขที่วัดได้จากการทดสอบที่ต่ำกว่าค่าที่คำนวณได้จากสูตรถือเป็นเรื่องปกติ ไม่ใช่สัญญาณของปัญหา
ถาม: อัตราทดของเฟืองตัวหนอนสามารถเปลี่ยนแปลงได้หรือไม่เมื่อเวลาผ่านไปและชิ้นส่วนสึกหรอ?
ไม่ — อัตราส่วนถูกกำหนดโดยจำนวนฟันและคงที่ตลอดอายุการใช้งานของชุดประกอบ สิ่งที่เปลี่ยนแปลงไปตามการสึกหรอคือระยะคลอน (ระยะการหมุนเล็กน้อยระหว่างเฟืองตัวหนอนและเฟืองตัวตามแรงโหลดกลับทิศทาง) และอาจรวมถึงประสิทธิภาพ (เนื่องจากความหยาบของพื้นผิวและสภาพของสารหล่อลื่นเปลี่ยนแปลงไป) อัตราส่วนนั้นเป็นรูปทรงเรขาคณิตและไม่เปลี่ยนแปลงตราบใดที่ยังมีทั้งฟันและเกลียวอยู่
ถาม: การคาดการณ์ประสิทธิภาพโดยใช้สูตรเหล่านี้มีความแม่นยำแค่ไหน?
สำหรับการกำหนดขนาดเบื้องต้น การคาดการณ์จากสูตรมีความแม่นยำภายใน ±5 เปอร์เซ็นต์ หากคุณเลือกมุมแรงเสียดทานที่สมจริง สำหรับการเลือกมอเตอร์ขั้นสุดท้ายในงานที่สำคัญ ควรขอข้อมูลการทดสอบจากผู้จำหน่าย — ผู้ผลิตที่มีชื่อเสียงส่วนใหญ่ รวมถึงบริษัทของเรา สามารถให้ข้อมูลประสิทธิภาพที่วัดได้ที่จุดโหลดและความเร็วหลายจุดได้ สูตรเป็นเครื่องมือที่เหมาะสมสำหรับการออกแบบเบื้องต้น ข้อมูลจากการทดสอบเป็นเครื่องมือที่เหมาะสมสำหรับการตัดสินใจขั้นสุดท้าย
หลักการคำนวณของเฟืองตัวหนอนและล้อเฟืองตัวหนอนนั้นตรงไปตรงมาแต่ก็มีความเสี่ยงสูง หากคำนวณอัตราส่วนพื้นฐานผิดพลาด ความผิดพลาดทางคณิตศาสตร์ก็จะปรากฏให้เห็นทันที หากคำนวณประสิทธิภาพผิดพลาด ระบบขับเคลื่อนจะถูกส่งออกไป ทำงานร้อนจัด ไม่ผ่านการรับประกัน และความผิดพลาดจะถูกซ่อนไว้เป็นเวลาหลายเดือนจนกว่าจะมีสินค้าส่งกลับมาซ่อม สูตรสองสูตรที่กล่าวถึงในตอนต้นของบทความนี้ครอบคลุมการคำนวณทั้งหมด เพียงแต่ต้องนำไปใช้ ณ จุดการทำงานจริง โดยใช้ค่าประมาณแรงเสียดทานที่สมจริง และปัดเศษให้เป็นจำนวนฟันเฟืองที่เป็นจำนวนเต็มที่โรงงานสามารถผลิตได้จริง
สำหรับทีมออกแบบ OEM จากเกาหลีและญี่ปุ่นที่ต้องการให้ตรวจสอบการคำนวณก่อนตัดสินใจเลือกมอเตอร์และอัตราส่วนต่างๆ ฝ่ายวิศวกรรมของเราจะดำเนินการตรวจสอบให้ การตรวจสอบการคำนวณอัตราทดเกียร์หนอน เมื่อพิจารณาจากรอบการทำงานของคุณ ระบบจะคำนวณประสิทธิภาพที่สมจริง ณ จุดการทำงานจริง และแนะนำคู่ฟันเฟืองที่โรงงานสามารถจัดส่งได้ตามระยะเวลานำส่งมาตรฐานในแคตตาล็อก อัตราส่วนมาตรฐานในแคตตาล็อกตั้งแต่ 5:1 ถึง 100:1 มีจำหน่ายในสต็อกของเรา ชุดเฟืองตัวหนอนแบบสตาร์ทเดี่ยวและแบบสตาร์ทหลายตัว สำหรับโมดูล M1 ถึง M8 และอัตราส่วนที่กำหนดเองนอกเหนือจากช่วงในแคตตาล็อก จะผลิตตามสั่งโดยอิงจากแบบร่าง
ต้องการตรวจสอบความเหมาะสมของอัตราส่วนและขนาดมอเตอร์ของคุณหรือไม่?
ส่งค่าแรงบิดขาออก ความเร็วรอบขาออก และรอบการทำงาน (duty cycle) มาให้เรา เราจะคำนวณอย่างละเอียด แนะนำคู่ฟันเฟืองที่เหมาะสม และแจ้งกำลังมอเตอร์ที่คำนวณได้จริงให้คุณทราบ โดยปกติจะใช้เวลาไม่เกินหนึ่งวันทำการของเกาหลี
บรรณาธิการ: Cxm


























