Rapport de transmission par vis sans fin et calcul — Formules, exemples, cas concrets
Les calculs derrière une paire vis sans fin et roue dentée, trois exemples résolus et la réalité des dentures entières qui ruine les proportions simples des manuels scolaires.
Le rapport de transmission d'un engrenage à vis sans fin est le nombre de dents de la roue divisé par le nombre de spires de la vis sans fin : i = Z₂ / Z₁. Une vis sans fin à une spire engrenant avec une roue de 40 dents donne un rapport de 40:1. Une vis sans fin à 4 spires sur la même roue donne un rapport de 10:1. Le rendement est déterminé par l'angle d'hélice et l'angle de frottement, selon la formule η = tan(λ) / tan(λ + φ) — généralement de 60 à 70 % pour les réducteurs à une spire à rapport élevé, et de 85 à 92 % pour les réducteurs à plusieurs spires à rapport faible. Le couple d'entrée requis est égal au couple de sortie divisé par (rapport × rendement). De plus, le nombre entier de dents implique que le rapport réel est rarement celui indiqué dans la fiche technique.
Les deux formules auxquelles chaque disque dur à ver revient
Oubliez un instant les longues listes d'équations de pas et de module. Deux formules déterminent 90 % des décisions de conception d'un couple vis sans fin et roue dentée, et la plupart des erreurs de calcul sur le terrain proviennent d'une mauvaise application de ces deux formules, et non de calculs géométriques complexes.
Formule 1 — Rapport de réduction (cinématique)
i = Z₂ / Z₁
Où Z₁ représente le nombre de spires de la vis sans fin (1, 2, 3, 4, parfois 6) et Z₂ le nombre de dents de la roue. Il s'agit d'un calcul purement géométrique ; le matériau et le lubrifiant n'interviennent pas.
Formule 2 — Rendement mécanique
η = tan(λ) / tan(λ + φ)
Où λ représente l'angle d'hélice de la vis sans fin (fonction du nombre de spires et du diamètre primitif de la vis) et φ l'angle de frottement au contact (de 5 à 8 degrés pour un contact acier-bronze bien lubrifié, de 10 à 15 degrés pour une lubrification insuffisante). C'est là que le matériau, l'état de surface et la composition du lubrifiant entrent en jeu.
L'importance de ces deux formules réside dans leur capacité à saisir le compromis fondamental des engrenages à vis sans fin : un rapport de réduction élevé implique un faible rendement, un rapport de réduction faible un rendement élevé, et les deux sont incompatibles. La seconde formule explique le coût caché de la première.

Lire correctement la formule du ratio
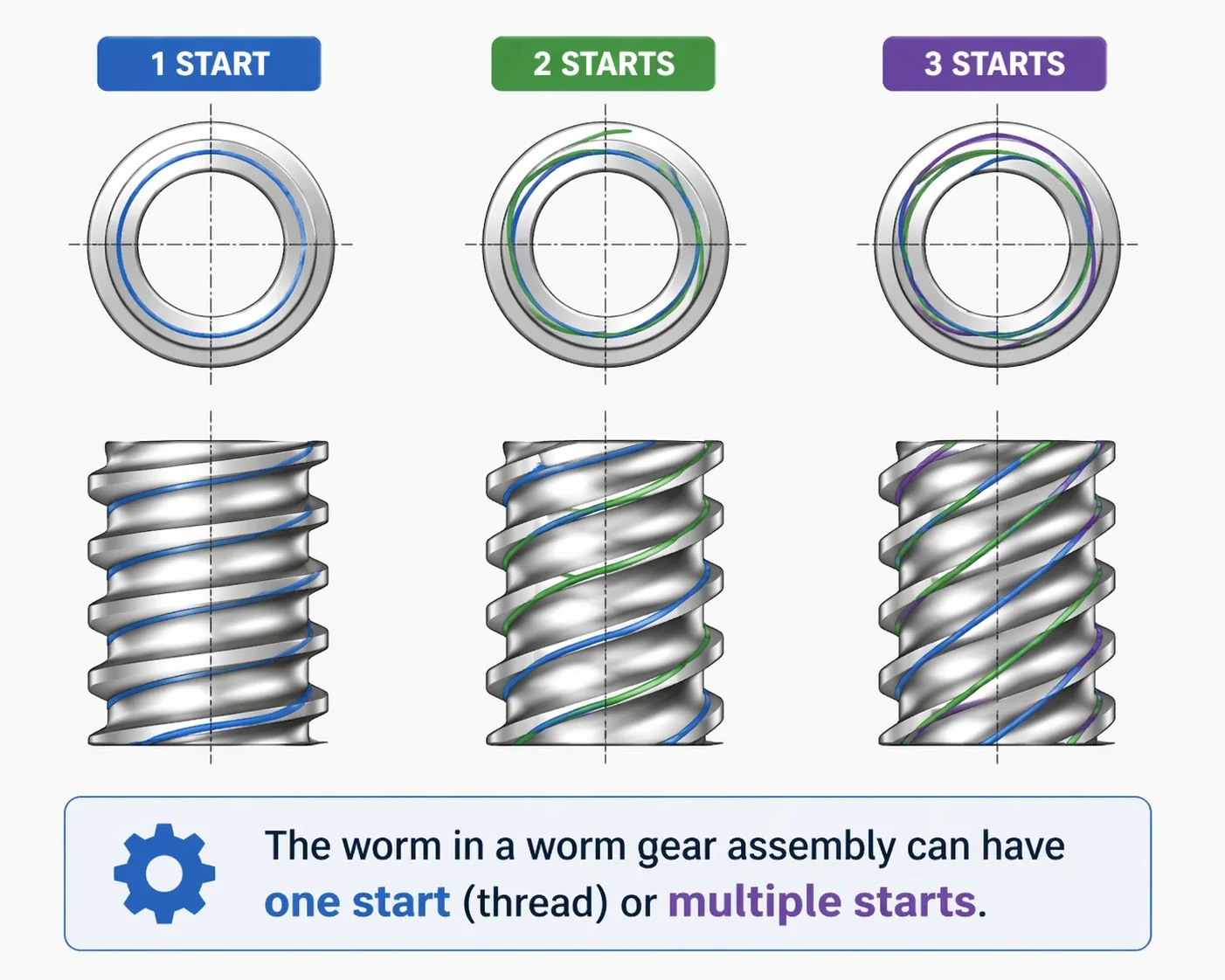
Z₁ compte le nombre de spires de la vis sans fin, et non le nombre total de crêtes de spires visibles à un point donné de sa circonférence. Observez la vis sans fin de face. Une vis sans fin à une seule spire présente un seul filet enroulé le long de l'axe. Une vis sans fin à deux spires présente deux filets s'enroulant en parallèle, décalés de 180 degrés. Une vis sans fin à quatre spires présente quatre filets parallèles espacés de 90 degrés. Le repère visuel est le nombre de filets distincts que vous pouvez suivre d'une extrémité à l'autre de la vis sans fin.
Z₂ compte les dents d'une roue de manière conventionnelle : le nombre total de dents sur la circonférence de la roue. Une roue à 40 dents possède 40 dents. Ce nombre est un entier par nécessité physique ; il est impossible d'avoir 40,5 dents.
Le piège des nombres entiers qui ruine les proportions idéales des manuels scolaires
Z₁ et Z₂ doivent être des entiers, et cette contrainte est plus importante que la plupart des calculateurs ne le reconnaissent. Si un client demande un rapport de 35:1 précis, notre service d'ingénierie doit l'informer qu'il obtiendra l'un des trois rapports pratiques les plus proches : Z₂ = 35 avec Z₁ = 1 donne exactement 35:1, Z₂ = 70 avec Z₁ = 2 donne également exactement 35:1, ou Z₂ = 36 avec Z₁ = 1 donne 36:1 (avec un dépassement de 2,9 %). Le choix dépend des autres besoins de l'application : Z₂ = 35 convient pour un entraînement à un seul démarrage, Z₂ = 70 double le diamètre de la roue pour un même module, et Z₂ = 36 représente un léger compromis permettant d'utiliser une taille de roue plus courante.
Demander un rapport de 35,5:1 est tout simplement impossible : aucune paire d'entiers ne permet d'obtenir exactement ce rapport. La valeur brute figurant sur la fiche technique doit être arrondie à une valeur réalisable en usine. Pour les applications OEM coréennes et japonaises, où les codeurs et les commandes de moteur en aval supposent un rapport de transmission précis, cet arrondi doit être effectué dès la conception, et non après la fabrication des pièces.
Comment l'efficacité découle de l'angle de chasse
L'angle d'hélice λ est l'angle formé par le pas de vis sans fin et un plan perpendiculaire à l'axe de la vis. Pour une vis sans fin à un seul filet et de faible diamètre primitif, λ peut être compris entre 3 et 5 degrés. Pour une vis sans fin à quatre filets, de même diamètre primitif et de même module, λ atteint 15 à 20 degrés. La relation est géométrique : plus le nombre de filets est élevé pour un même module, plus l'hélice est raide.
En intégrant les valeurs numériques dans la formule d'efficacité, le compromis devient concret. Supposons un angle de frottement φ = 6 degrés, valeur réaliste pour un contact acier-bronze phosphoreux bien lubrifié :
La forme de la courbe est importante. Passer d'un angle d'hélice de 3° à 10° double quasiment le rendement. En revanche, passer de 20° à 30° n'a qu'un impact minime. Le point optimal pour les réducteurs à démarrage multiple à haut rendement se situe autour de 15 à 20 degrés d'angle d'hélice ; au-delà, les gains diminuent et la largeur de la face de la roue dentée, essentielle à la réutilisation du réducteur, se réduit. La plupart des couples vis sans fin/roue dentée disponibles dans le catalogue se répartissent en deux catégories : 3 à 5 degrés (autobloquants à rapport élevé) ou 12 à 18 degrés (entraînement à rendement moyen).
Un piège fréquent : un concepteur lit « η = 70 % » sur le catalogue d’un fabricant et considère cette valeur comme une constante pour dimensionner le moteur. Or, ce n’est pas le cas. Ce chiffre de 70 % correspond au rendement nominal à charge et vitesse nominales. À un dixième de la charge, le couple de frottement à l’intérieur du réducteur reste approximativement constant tandis que le couple utile chute d’un facteur dix ; le rendement mesuré peut alors descendre en dessous de 30 %. Il faut toujours dimensionner le moteur en fonction du point de fonctionnement réel, et non de la valeur indiquée sur la plaque signalétique. Si le cycle de service ne comporte que de faibles charges, le pourcentage à utiliser pour le calcul du couple d’entrée est la valeur à charge partielle, et non celle du catalogue.
Exemple pratique 1 — Entraînement par courroie transporteuse
Un convoyeur à bande plate transporte 80 kg de produit à 0,5 m/s sur une longueur de 40 m. La poulie motrice a un diamètre de 200 mm. Le client souhaite un fonctionnement intermittent (40 % marche, 60 % arrêt) et un entraînement silencieux. Le système autobloquant n'est pas nécessaire car la bande est horizontale.
Le guide ci-dessous détaille chaque étape de calcul, de la force exercée sur la courroie à la sélection du moteur. La même procédure s'applique à tout dimensionnement de convoyeur ; seules les valeurs numériques changent.

Notez l'arrondi effectué à l'étape 5 : le rapport arithmétique exact est de 29,4:1, mais le rapport de denture le plus proche, utilisable en pratique, est de 30:1, ce qui entraîne une vitesse de courroie légèrement inférieure. Le client a accepté ce compromis sans que cela ne se remarque à la sortie du convoyeur. C'est un comportement courant pour les entraînements industriels.
Exemple pratique 2 — Entraînement du tambour de levage

Un petit palan d'atelier soulève jusqu'à 500 kg sur un tambour de 100 mm de rayon. La vitesse de levage est de 6 m/min. Le verrouillage automatique est indispensable afin d'éviter tout risque de chute de la charge. Le client souhaite utiliser un moteur triphasé standard de 1 400 tr/min.
Le verrouillage automatique élimine les vis sans fin à plusieurs spires — nous sommes contraints à une conception à une seule spire avec un angle d'hélice faible, en acceptant la pénalité d'efficacité.
Deux points ressortent de ce calcul. Premièrement, la perte d'efficacité liée au verrouillage automatique est considérable : environ 67 % de la puissance absorbée est dissipée sous forme de chaleur dans le réducteur. Deuxièmement, la puissance requise par le moteur (3 kW) est bien supérieure à celle nécessaire pour une même charge avec un réducteur hélicoïdal à angle droit à haut rendement (environ 1,5 kW). Le client paie donc le surcoût du verrouillage automatique par une surconsommation d'électricité sur toute la durée de vie du palan. Pour un palan d'atelier fonctionnant environ 200 heures par an, ce compromis est acceptable. En revanche, pour un palan de production fonctionnant 24 h/24, il ne l'est pas : la solution optimale consiste alors en un réducteur hélicoïdal associé à un frein mécanique séparé.
Exemple pratique 3 — Table rotative d'indexage
Une table d'indexage à 4 stations positionne les dispositifs de soudage des armatures de sièges automobiles. Chaque station supporte une charge de 12 kg, pour une masse totale de 80 kg et un rayon de 400 mm. Le temps d'indexation par station est de 1,2 seconde (rotation de 90 degrés). Le couple de maintien entre les mouvements doit résister aux chocs accidentels, mais l'entraînement est maintenu électriquement par un servofrein ; un verrouillage automatique est souhaitable, mais non obligatoire.
Ce calcul est dynamique, et non statique. La charge dominante est l'accélération de la masse de la table sur 90 degrés en 1,2 seconde ; le couple maximal est atteint pendant l'accélération, et non pendant la rotation stable. Les applications servo nécessitent également un jeu angulaire inférieur à celui des convoyeurs ou des palans.
Le profil d'accélération suppose une rampe de vitesse triangulaire : accélération pendant les 0,6 premières secondes, décélération pendant les 0,6 dernières secondes. La vitesse angulaire maximale au point médian est de 2 × 0,785 rad / 1,2 s = 1,31 rad/s. L'accélération angulaire maximale est de 1,31 / 0,6 = 2,18 rad/s².
En résumé : les applications d’indexage dynamique pilotent le calcul par le couple d’accélération, et non par le couple en régime permanent. Le moment d’inertie polaire de la table est souvent prépondérant par rapport à la masse de la pièce, notamment sur les tables rotatives en acier lourd. Le servomoteur doit être sélectionné en fonction du couple maximal, et non du couple moyen ; à défaut, c’est la cause la plus fréquente du blocage des prototypes d’indexage dès le premier cycle.
Erreurs de calcul courantes qui ruinent les conceptions
Confusion entre Z₁ et Z₂. Un nombre surprenant de premiers schémas présentent une inversion des dents de la vis sans fin et de la roue : quelqu'un a inscrit le nombre de dents de la roue là où la formule attend le début de la vis sans fin. Il en résulte un rapport calculé de 1/40 au lieu de 40, ce qui rend le calcul absurde et compromet la conception. Il est impératif d'indiquer clairement : Z₁ pour la vis sans fin, Z₂ pour la roue.
Oublier de diviser par l'efficacité. Le rapport de base donne la relation cinématique entre les vitesses d'entrée et de sortie. Pour obtenir le couple, il faut diviser par le rendement. Omettre ce diviseur revient à choisir un moteur sous-dimensionné. Le variateur calera alors sous charge nominale. Le couple d'entrée est toujours égal au couple de sortie divisé par (rapport × rendement).
Considérer l'efficacité comme une constante. Le rendement nominal indiqué correspond à la charge nominale. Le rendement à faible charge est nettement inférieur car le couple de frottement à l'intérieur de la boîte de vitesses reste sensiblement constant tandis que le couple utile diminue. Il est impératif de toujours utiliser le rendement au point de fonctionnement, et non la valeur nominale.
Utilisation du couple statique pour des applications dynamiques. Les tables d'indexage, les palans soumis à des chocs et tout système d'entraînement avec des cycles d'arrêt-démarrage fréquents doivent être dimensionnés pour le couple d'accélération maximal, et non pour le couple en régime permanent. La valeur maximale peut être de 2 à 4 fois supérieure à la valeur en régime permanent, selon la durée du cycle.
Exiger des ratios non entiers. Demander un rapport de 47,3:1 est impossible. Arrondissez au rapport de denture entier le plus proche dès la conception. Si le contrôleur en aval requiert un rapport précis, définissez d'abord le rapport d'engrenage et laissez le contrôleur s'adapter automatiquement au rapport réel.
Oublier le facteur service. Un variateur dimensionné précisément en fonction du couple nominal calculé ne présente aucune marge de manœuvre pour les variations de tension secteur, le vieillissement, les surcharges occasionnelles ou les cycles thermiques. Appliquez un coefficient de service compris entre 1,3 (utilisation intermittente légère) et 2,5 (charges importantes et brusques) avant de sélectionner le moteur et le réducteur.
Foire aux questions
Q : Le rapport de transmission est-il identique au rapport de réduction ?
Pour un système vis sans fin-roue où la vis sans fin est l'élément moteur, le rapport de réduction i = Z₂/Z₁ correspond bien au rapport de réduction. L'arbre de sortie effectue une rotation pour i rotations de l'arbre d'entrée. Dans les rares configurations où la roue entraîne la vis sans fin (systèmes à démarrage multiple réversible utilisés comme roue libre), la formule du rapport de réduction reste la même, mais l'interprétation cinématique est inversée. Le système vis sans fin-roue est le cas standard et le seul qui nécessite un traitement sans ambiguïté.
Q : Comment calcule-t-on l'angle d'hélice à partir des dimensions de la vis sans fin ?
L'angle d'hélice λ est donné par la formule : λ = arctan(L / (π × d₁)), où L représente l'hélice (avance axiale par tour = Z₁ × pas axial) et d₁ le diamètre primitif de la vis sans fin. Pour une vis sans fin à un seul spire, avec un pas axial de 9,42 mm et un diamètre primitif de 36 mm : L = 9,42 mm, π × d₁ = 113,1 mm, donc λ = arctan(9,42/113,1) = 4,76°. Les vis sans fin à plusieurs spires ont un angle d'hélice proportionnellement plus grand ; une vis sans fin à deux spires, de même pas et de même diamètre, aurait un angle d'hélice λ = arctan(18,84/113,1) = 9,46°.
Q : Quel est l'angle de frottement typique des engrenages à vis sans fin industriels ?
Pour un engrenage acier sur bronze phosphoreux bien lubrifié avec une huile synthétique, l'angle de frottement φ est d'environ 5 à 7 degrés (μ = 0,087 à 0,12). Avec une huile minérale à température modérée, il est de 7 à 9 degrés. En cas de lubrification insuffisante ou pendant le rodage, il est de 10 à 15 degrés. La vitesse de glissement influe sur le frottement : à très basse vitesse (inférieure à 0,5 m/s), le régime de lubrification limite prédomine et φ augmente progressivement ; à vitesse modérée (1 à 5 m/s), les effets hydrodynamiques diminuent φ ; à très haute vitesse, l'échauffement tend à faire remonter φ. La plupart des calculateurs industriels utilisent une valeur constante de 6 degrés comme première estimation.
Q : Comment obtenir un ratio non standard exact comme 50,5:1 ?
C'est impossible, du moins pas avec un seul étage vis sans fin/roue dentée. Le rapport Z₂/Z₁ doit être un rapport d'entiers, et 50,5 = 10¹/². La seule solution en un seul étage est donc Z₁ = 2 et Z₂ = 10¹. Une roue à 101 dents est inhabituelle, mais réalisable. L'approche la plus courante consiste à utiliser deux étages : un étage à vis sans fin de rapport 50:1 suivi d'un petit étage à engrenages droits ou planétaires pour ajuster le rapport global. Les transmissions à deux étages permettent également d'atteindre des rapports supérieurs à 200:1, qu'aucun engrenage à vis sans fin en un seul étage ne peut atteindre de manière optimale.
Q : Pourquoi mes chiffres d'efficacité mesurés sont-ils inférieurs aux prévisions de la formule ?
La formule η = tan(λ)/tan(λ+φ) ne donne que le rendement d'engrènement. La formule complète réducteur à vis sans fin Le rendement global de la transmission est généralement inférieur de 5 à 10 points de pourcentage au rendement d'engrènement prévu. Pour une unité avec un rendement d'engrènement prévu de 70 %, le rendement global devrait se situer entre 60 et 65 %. Des valeurs mesurées en laboratoire inférieures à la prédiction du calcul sont normales et ne constituent pas un signe de problème.
Q : Le rapport de transmission d'un engrenage à vis sans fin peut-il changer avec le temps à mesure que l'unité s'use ?
Non, le rapport est déterminé par le nombre de dents et reste fixe pendant toute la durée de vie de l'ensemble. Ce qui varie avec l'usure, c'est le jeu (le léger jeu de rotation entre la vis sans fin et la roue dentée sous charge inverse) et éventuellement le rendement (en raison de la variation de la rugosité de surface et de l'état du lubrifiant). Le rapport lui-même est géométrique et immuable tant que les dents et le filetage sont présents.
Q : Dans quelle mesure ces prévisions d'efficacité basées sur des formules sont-elles précises ?
Pour un dimensionnement initial, les prédictions de la formule sont précises à ±5 points de pourcentage près si vous choisissez un angle de frottement réaliste. Pour la sélection finale du moteur dans les applications critiques, demandez des données d'essais sur banc au fournisseur ; la plupart des fabricants réputés, y compris le nôtre, peuvent fournir des courbes de rendement mesurées à différents points de charge et de vitesse. La formule est l'outil idéal pour la conception préliminaire ; les données d'essais sur banc sont indispensables pour la décision finale.
Le calcul d'un système à vis sans fin et roue dentée est simple mais impitoyable. Une erreur dans la formule du rapport de base et les aberrations mathématiques apparaissent immédiatement. Une erreur dans le calcul du rendement et le système est livré défectueux, surchauffe, perd sa garantie et l'erreur reste cachée pendant des mois jusqu'à ce que les retours clients affluent. Les deux formules présentées en début d'article permettent de résoudre l'essentiel du problème ; il suffit de les appliquer au point de fonctionnement réel, avec des estimations de frottement réalistes et en arrondissant les valeurs à un nombre entier de dents compatible avec la production en usine.
Pour les équipes de conception des équipementiers coréens et japonais qui souhaitent faire vérifier un calcul avant de s'engager sur les spécifications du moteur et du rapport de transmission, notre bureau d'études propose un service d'analyse. révision du calcul du rapport de transmission par vis sans fin En fonction de votre cycle de service, il applique un rendement réaliste au point de fonctionnement réel et recommande une paire de dents que l'usine peut livrer dans les délais standard du catalogue. Les rapports de transmission standard du catalogue, de 5:1 à 100:1, sont disponibles en stock dans notre entrepôt. ensembles d'engrenages à vis sans fin à un ou plusieurs démarrages pour les modules M1 à M8, et les rapports personnalisés hors de la gamme du catalogue sont fabriqués sur commande à partir d'un dessin.
Besoin d'une vérification de la cohérence de votre ratio et du dimensionnement de votre moteur ?
Envoyez-nous votre couple de sortie, votre régime moteur et votre rapport cyclique. Nous effectuerons le calcul complet, vous recommanderons un engrenage à denture entière et vous indiquerons la puissance moteur requise – généralement sous 24 heures ouvrables en Corée.
Éditeur : Cxm


























