웜 기어비 및 계산 — 공식, 예시, 실제 사례
웜 기어와 웜 휠 쌍에 숨겨진 산술적 원리, 세 가지 예제, 그리고 교과서적인 깔끔한 비율을 무너뜨리는 정수 톱니의 현실.
웜 기어비는 톱니 수를 웜 기어의 시작 횟수로 나눈 값입니다. 즉, i = Z₂ / Z₁입니다. 톱니 수가 40개인 톱니바퀴에 웜 기어가 1개 시작되면 기어비는 40:1이 됩니다. 같은 톱니바퀴에 웜 기어가 4개 시작되면 기어비는 10:1이 됩니다. 효율은 리드각과 마찰각에 의해 결정되며, η = tan(λ) / tan(λ + φ) 공식으로 나타낼 수 있습니다. 일반적으로 고비의 웜 기어 1개 시작 구동 장치의 효율은 60~70%, 저비의 웜 기어 2개 시작 구동 장치의 효율은 85~92%입니다. 필요한 입력 토크는 출력 토크를 (기어비 × 효율)로 나눈 값과 같습니다. 톱니 수가 정수인 경우 실제 기어비는 사양서에 입력한 정수와 다를 수 있습니다.
모든 웜 드라이브가 결국 되돌아오는 두 가지 공식
복잡한 피치 및 모듈 방정식 목록은 잠시 잊어버리세요. 웜 기어와 웜 휠 쌍 설계에서 90%의 결정은 단 두 가지 공식에 달려 있으며, 현장에서 발생하는 대부분의 계산 오류는 고급 기하학 때문이 아니라 이 두 가지 공식을 잘못 적용한 데서 비롯됩니다.
공식 1 — 감속비(운동학적)
i = Z₂ / Z₁
여기서 Z₁은 웜 기어의 시작 개수(1, 2, 3, 4, 경우에 따라 6)이고 Z₂는 기어 톱니의 개수입니다. 이는 순전히 기하학적인 계산이며, 재질이나 윤활유는 고려하지 않습니다.
포뮬러 2 - 기계적 효율
η = tan(λ) / tan(λ + φ)
여기서 λ는 웜 기어의 리드 각도(시작 횟수와 웜 기어 피치 직경의 함수)이고 φ는 접촉면의 마찰각(윤활이 잘 된 강철-청동 접촉면의 경우 5~8도, 윤활이 불량한 경우 10~15도)입니다. 재질, 표면 마감 및 윤활유의 화학적 성질이 이 값에 영향을 미칩니다.
이 두 공식이 매우 중요한 이유는 웜 기어의 핵심적인 상충 관계를 나타내기 때문입니다. 즉, 기어비가 높으면 효율이 낮고, 기어비가 낮으면 효율이 높으며, 같은 시스템에서 두 가지를 모두 가질 수는 없습니다. 두 번째 공식은 첫 번째 공식에 숨겨진 비용을 설명합니다.

비율 공식을 올바르게 읽는 것
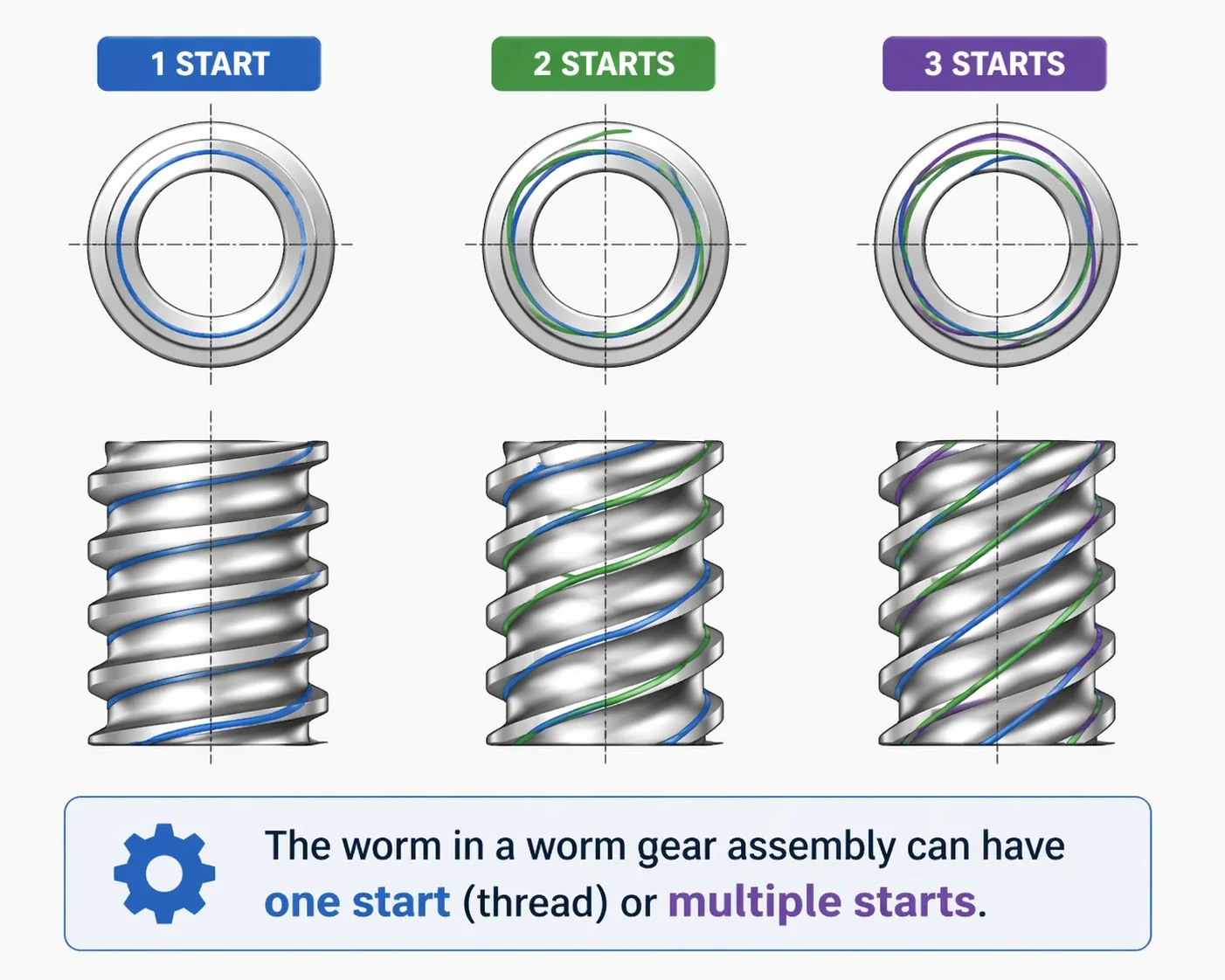
Z₁는 웜의 나선형 나사산 시작 개수를 세는 것이지, 원주 방향의 어느 한 위치에서 보이는 나사산 봉우리의 총 개수를 세는 것이 아닙니다. 웜을 정면에서 보면, 나사산 시작점이 하나인 웜은 축을 따라 나선형으로 감긴 나사산이 하나 보입니다. 나사산 시작점이 두 개인 웜은 180도 어긋나게 평행하게 감긴 나사산이 두 개 보입니다. 나사산 시작점이 네 개인 웜은 90도 간격으로 평행하게 감긴 나사산이 네 개 보입니다. 시각적인 단서는 웜의 한쪽 끝에서 다른 쪽 끝까지 추적할 수 있는 개별 나사산의 개수입니다.
Z₂는 기존 방식대로 휠의 톱니 수를 계산합니다. 즉, 휠 둘레를 따라 톱니가 총 40개라는 뜻입니다. 톱니 수가 정수인 이유는 물리적으로 40.5개일 수는 없기 때문입니다.
교과서적인 깔끔한 비율을 망치는 정수 함정
Z₁과 Z₂는 모두 정수여야 하며, 이 제약 조건은 대부분의 계산기가 인식하는 것보다 훨씬 중요합니다. 고객이 "정확히 35:1"을 요청하면, 엔지니어링 부서에서는 실제 가능한 세 가지 비율 중 하나를 제공해야 한다고 알려줘야 합니다. Z₂ = 35, Z₁ = 1일 때 정확히 35:1이 되고, Z₂ = 70, Z₁ = 2일 때도 정확히 35:1이 되며, Z₂ = 36, Z₁ = 1일 때는 36:1(2.9% 오버슈트)이 됩니다. 어떤 비율을 선택할지는 애플리케이션의 다른 요구 사항에 따라 달라집니다. Z₂ = 35는 단일 시동 구동 장치에 적합하고, Z₂ = 70은 동일한 모듈에서 휠 직경을 두 배로 늘리며, Z₂ = 36은 보다 일반적인 휠 크기를 사용할 수 있도록 하는 약간의 절충안입니다.
35.5:1과 같은 기어비를 요구하는 것은 불가능합니다. 정확히 그 비율을 나타내는 정수 쌍은 존재하지 않기 때문입니다. 설계 도면에 기재된 정확한 수치는 공장에서 실제로 가공할 수 있는 값으로 반올림되어야 합니다. 특히 한국 및 일본 OEM 업체들이 하위 단계의 엔코더와 모터 제어 장치에서 정확한 기어비를 요구하는 경우, 이러한 반올림은 부품 제작 후가 아니라 설계 단계에서 이루어져야 합니다.
효율성은 리드 각도에서 어떻게 도출되는가
리드 앵글 λ는 웜 기어의 나선과 웜 축에 수직인 평면 사이의 각도입니다. 피치 직경이 작은 단일 스타트 웜의 경우 λ는 3~5도 정도입니다. 동일한 피치 직경과 모듈을 가진 4스타트 웜의 경우 λ는 15~20도까지 증가합니다. 이 관계는 기하학적입니다. 즉, 동일한 모듈에서 스타트 수가 많을수록 나선의 경사가 가파르게 됩니다.
효율 공식에 수치를 대입하면 상충 관계가 구체화됩니다. 윤활이 잘 된 강철-인청동 마찰면에서 현실적인 마찰각인 φ = 6도를 가정해 보겠습니다.
곡선의 형태가 중요합니다. 리드 각도가 3°에서 10°로 증가하면 효율이 거의 두 배로 향상됩니다. 하지만 20°에서 30°로 증가해도 효율 변화는 미미합니다. 고효율 다중 시동 드라이브의 최적 리드 각도는 15~20도 부근입니다. 이 범위를 넘어서면 효율이 떨어지고, 드라이브의 유지보수성을 확보하는 데 필요한 휠 면폭이 줄어들기 시작합니다. 대부분의 시판 웜 기어와 웜 휠은 3~5도(고비율 셀프록킹) 또는 12~18도(중비율 고효율 구동)의 두 가지 범위로 나뉩니다.
자주 목격하는 함정이 있습니다. 설계자가 제조업체 카탈로그에서 "η = 70퍼센트"라는 문구를 보고 모터 크기를 정할 때 상수로 간주하는 것입니다. 하지만 이는 잘못된 생각입니다. 70퍼센트는 정격 부하 및 정격 속도에서의 정격 효율입니다. 부하가 1/10로 줄어들면 기어박스 내부의 마찰 토크는 거의 일정하게 유지되는 반면, 유효 토크는 1/10로 감소합니다. 따라서 측정된 효율은 30% 미만으로 떨어질 수 있습니다. 항상 명판의 수치가 아닌 실제 작동 지점을 기준으로 모터 크기를 결정해야 합니다. 작동 주기에서 저부하만 발생하는 경우, 입력 토크 계산에 대입해야 하는 백분율은 카탈로그에 명시된 수치가 아니라 부분 부하에서의 수치입니다.
예제 1 — 컨베이어 벨트 구동 장치
평벨트 컨베이어가 40m 길이의 라인을 따라 0.5m/s의 속도로 80kg의 제품을 이송합니다. 구동 풀리의 직경은 200mm입니다. 고객은 간헐 작동(40% 작동, 60% 정지)과 저소음 구동을 원합니다. 벨트가 수평이므로 셀프록킹 기능은 필요하지 않습니다.
아래 단계별 설명은 벨트 장력 계산부터 모터 선정까지 모든 계산 과정을 보여줍니다. 이 절차는 모든 컨베이어 크기 산정 작업에 적용 가능하며, 입력값만 변경하면 됩니다.

5단계에서 반올림 결정을 살펴보십시오. 정확한 산술 비율은 29.4:1이지만, 실제로 가장 가까운 정수 톱니 비율은 30:1이며, 이로 인해 벨트 속도가 약간 느려집니다. 고객은 컨베이어 출력에서 눈에 띄는 차이 없이 이러한 절충안을 받아들였습니다. 이는 산업용 구동 장치에서 흔히 발생하는 일입니다.
예제 2 — 호이스트 드럼 구동

소형 작업장용 호이스트는 반경 100mm 드럼에서 최대 500kg까지 들어 올릴 수 있습니다. 인양 속도는 6m/min으로 지정되어 있습니다. 하중이 떨어질 경우 안전상의 위험이 발생하므로 자동 잠금 장치가 필수적입니다. 고객은 표준 1,400rpm 3상 모터를 사용하기를 원합니다.
셀프록킹 기능으로 인해 멀티 스타트 웜 기어가 없어지므로, 효율 손실을 감수하면서 낮은 리드 각도를 가진 1스타트 설계를 사용할 수밖에 없습니다.
이 계산에서 두 가지 중요한 점이 눈에 띕니다. 첫째, 셀프록킹으로 인한 효율 손실이 상당합니다. 입력 전력의 약 67%가 구동 장치에서 열로 손실됩니다. 둘째, 모터 출력 요구량(3kW)은 고효율 헬리컬 직각 감속기를 사용할 때 동일한 부하에 필요한 출력(약 1.5kW)보다 훨씬 높습니다. 고객은 호이스트 수명 동안 셀프록킹으로 인해 추가 전력을 소비하는 비용을 부담하게 됩니다. 연간 약 200시간 가동되는 작업장용 호이스트의 경우 이러한 절충안이 용납될 수 있습니다. 하지만 24시간 가동되는 생산용 호이스트의 경우에는 그렇지 않습니다. 이러한 경우에는 헬리컬 감속기와 별도의 기계식 브레이크를 사용하는 것이 올바른 해결책입니다.
예제 3 — 인덱싱 로터리 테이블
4스테이션 인덱싱 테이블은 자동차 시트 프레임 용접 고정 장치를 위치시키는 데 사용됩니다. 각 스테이션은 12kg을 지탱할 수 있으며, 테이블 전체 무게는 80kg, 테이블 반경은 400mm입니다. 스테이션당 인덱싱 시간은 1.2초(90도 회전)입니다. 동작 사이의 유지 토크는 우발적인 충격에 저항해야 하지만, 구동 장치 자체는 서보 브레이크로 전기적으로 제어됩니다. 자체 잠금 기능은 바람직하지만 필수 사항은 아닙니다.
이 계산은 정적인 것이 아니라 동적인 것입니다. 주된 부하는 테이블 질량이 1.2초 동안 90도 회전하며 가속되는 것인데, 최대 토크는 안정적인 회전 중이 아니라 가속 중에 발생합니다. 서보 모터는 컨베이어나 호이스트와 같은 일반적인 응용 분야보다 백래시가 더 작아야 합니다.
가속도 프로파일은 삼각형 형태의 속도 증가 곡선을 가정합니다. 처음 0.6초 동안은 가속하고, 마지막 0.6초 동안은 감속합니다. 중간 지점에서의 최대 각속도는 2 × 0.785 rad / 1.2 s = 1.31 rad/s입니다. 최대 각가속도는 1.31 / 0.6 = 2.18 rad/s²입니다.
핵심은 동적 인덱싱 애플리케이션이 정상 상태 토크가 아닌 가속 토크를 통해 계산을 수행한다는 것입니다. 특히 무거운 강철 회전 테이블의 경우 테이블 자체의 관성 모멘트가 공작물 질량보다 훨씬 큰 영향을 미칩니다. 서보 모터 선택 시 평균 토크가 아닌 최대 토크를 만족해야 하며, 이를 충족하지 못하면 인덱싱 프로토타입이 첫 번째 사이클에서 멈추는 가장 흔한 원인이 됩니다.
설계를 망치는 흔한 계산 오류
Z₁과 Z₂를 혼동하고 있습니다. 놀랍게도 처음 제출된 도면 중 상당수가 웜 기어의 시작 위치와 휠 톱니의 위치가 바뀌어 있습니다. 누군가 공식에서 웜 기어가 시작되는 위치에 휠 톱니의 개수를 적어 놓은 것입니다. 그 결과 계산된 비율이 40이 아닌 1/40이 되어 계산이 터무니없어 보이고 설계가 완전히 중단됩니다. 항상 명확하게 표시하십시오. Z₁은 웜 기어, Z₂는 휠을 나타냅니다.
효율성으로 나누는 것을 잊어버렸습니다. 기본 기어비는 입력 속도와 출력 속도 사이의 운동학적 관계를 나타냅니다. 이를 토크로 변환하려면 효율로 나누어야 합니다. 효율을 나누는 과정을 생략하면 실제 출력에 비해 너무 작은 모터를 선택하게 되어 정격 부하에서 구동 장치가 정지하게 됩니다. 입력 토크 = 출력 토크 ÷ (기어비 × 효율)은 항상 성립합니다.
효율성을 상수로 간주합니다. 표기된 정격 효율은 정격 부하에서의 값입니다. 저부하 시 효율은 훨씬 낮아지는데, 이는 변속기 내부의 마찰 토크는 거의 일정하게 유지되는 반면 유효 토크는 감소하기 때문입니다. 항상 표기된 수치가 아닌 실제 작동 시의 효율을 사용하십시오.
동적 응용 분야에 정적 토크를 사용합니다. 인덱싱 테이블, 충격 하중을 받는 호이스트, 그리고 잦은 시동-정지 사이클을 거치는 모든 구동 장치는 정상 상태 토크가 아닌 최대 가속 토크를 기준으로 크기를 정해야 합니다. 최대 토크는 사이클 시간에 따라 정상 상태 토크의 2~4배에 달할 수 있습니다.
정수가 아닌 비율을 요구합니다. 47.3:1과 같은 기어비를 요구하는 것은 해결책이 없습니다. 설계 단계에서 가장 가까운 정수 기어비로 반올림해야 합니다. 하위 제어기에서 정확한 기어비가 필요한 경우, 먼저 기어비를 설계하고 제어기가 실제 기어비에 맞춰 스케일링하도록 하십시오.
서비스 요소를 간과하고 있습니다. 계산된 공칭 토크에 정확히 맞춰 설계된 구동 장치는 전압 변동, 노화, 간헐적 과부하 또는 열 순환에 대한 여유가 전혀 없습니다. 모터와 기어 세트를 선택하기 전에 1.3(경미한 간헐적 부하)에서 2.5(심한 충격 부하) 사이의 서비스 계수를 적용하십시오.
자주 묻는 질문
질문: 기어비는 감속비와 같은 것인가요?
웜 기어가 구동축인 웜-웜 휠 쌍의 경우, 기어비 i = Z₂/Z₁는 감속비와 같습니다. 즉, 출력축은 입력축이 i번 회전할 때마다 한 번 회전합니다. 드물게 휠이 웜 기어를 구동하는 구조(오버러닝 클러치로 사용되는 역구동식 다중 시동 장치)에서는 기어비 공식은 동일하지만 운동학적 해석이 반대로 됩니다. 웜 기어가 휠을 구동하는 경우가 표준적인 경우이며, 이 경우에만 명확한 설명이 필요합니다.
질문: 웜 기어의 치수로부터 리드 각도는 어떻게 계산되나요?
리드 각도 λ = arctan( L / (π × d₁) ), 여기서 L은 리드(회전당 축 방향 전진 거리 = Z₁ × 축 방향 피치)이고 d₁은 웜 기어의 피치 직경입니다. 축 방향 피치가 9.42mm이고 피치 직경이 36mm인 1스타트 웜의 경우, L = 9.42mm, π × d₁ = 113.1mm이므로 λ = arctan(9.42/113.1) = 4.76°입니다. 멀티스타트 웜은 비례적으로 더 큰 리드를 가지며, 동일한 피치와 직경을 가진 2스타트 웜의 경우 λ = arctan(18.84/113.1) = 9.46°입니다.
질문: 산업용 웜 기어 세트의 일반적인 마찰각은 얼마입니까?
합성 기어 오일을 사용하여 윤활이 잘 된 강철-인청동 마찰면의 마찰각 φ는 대략 5~7도(μ = 0.087~0.12)입니다. 적당한 온도에서 광물유를 사용할 경우 7~9도입니다. 윤활이 불량하거나 길들이기 조건에서는 10~15도입니다. 슬라이딩 속도는 마찰에 영향을 미칩니다. 매우 낮은 속도(0.5m/s 미만)에서는 경계 윤활이 지배적이어서 φ가 서서히 증가합니다. 중간 속도(1~5m/s)에서는 유체역학적 효과로 인해 φ가 감소합니다. 매우 높은 속도에서는 발열로 인해 φ가 다시 증가합니다. 대부분의 산업용 계산기는 초기 추정치로 6도를 일정하게 가정합니다.
질문: 50.5:1과 같은 정확한 비표준 비율을 어떻게 얻을 수 있나요?
단일 웜 기어와 웜 휠로는 불가능합니다. 기어비 Z₂/Z₁는 정수비여야 하는데, 50.5 = 10⁻²이므로 단일 기어로는 Z₁ = 2, Z₂ = 10⁻¹이 되어야 합니다. 101개의 톱니를 가진 웜 휠은 흔하지는 않지만 제작 가능합니다. 일반적으로는 2단 기어를 사용합니다. 50:1 기어비의 웜 기어 단 다음에 작은 스퍼 기어나 유성 기어 단을 추가하여 전체 기어비를 미세 조정합니다. 2단 기어 구동 장치는 단일 기어로는 깔끔하게 구현할 수 없는 200:1 이상의 기어비도 달성할 수 있습니다.
질문: 측정된 효율 수치가 공식 예측치보다 낮게 나오는 이유는 무엇입니까?
η = tan(λ)/tan(λ+φ) 공식은 기어 맞물림 효율만 제공합니다. 전체 효율은 다음과 같습니다. 웜 기어 감속기 또한 베어링 손실, 오일 씰 마찰, 오일 교반 손실 등은 공식에 반영되지 않습니다. 전체 구동 효율은 일반적으로 기어 맞물림 수치보다 5~10% 포인트 낮습니다. 예측된 η_mesh가 70%인 장치의 경우 전체 구동 효율은 약 60~65% 정도일 것으로 예상됩니다. 공식 예측치보다 낮은 실측 수치는 정상적인 현상이며, 문제가 있다는 신호는 아닙니다.
질문: 웜 기어비는 장치가 마모됨에 따라 시간이 지남에 따라 변할 수 있습니까?
아니요, 기어비는 톱니 개수에 따라 결정되며 어셈블리의 수명 동안 고정되어 있습니다. 마모로 인해 변하는 것은 백래시(역방향 하중을 받을 때 웜 기어와 휠 사이의 작은 회전 유격)와 효율(표면 거칠기 및 윤활 상태의 변화로 인해)입니다. 기어비 자체는 기하학적이며 톱니와 나사산이 존재하는 한 변하지 않습니다.
질문: 이러한 공식 기반 효율성 예측은 얼마나 정확합니까?
초기 설계 단계에서는 현실적인 마찰각을 선택하면 공식 예측값이 ±5% 포인트 이내의 정확도를 보입니다. 중요한 용도에 대한 최종 모터 선정 시에는 공급업체에 벤치 테스트 데이터를 요청하십시오. 당사를 포함한 대부분의 평판 좋은 제조업체는 다양한 부하 및 속도 지점에서 측정된 효율 곡선을 제공할 수 있습니다. 공식은 초기 설계에 적합한 도구이며, 벤치 테스트 데이터는 최종 선정에 적합한 도구입니다.
웜 기어와 웜 휠 쌍의 연산은 간단해 보이지만, 실수를 용납하지 않습니다. 기본 비율 공식을 잘못 사용하면 계산 오류가 즉시 드러납니다. 효율 계산이 잘못되면 제품이 출하되어 과열되고 보증 수리가 거부되며, 현장 반품이 시작될 때까지 몇 달 동안 오류가 숨겨져 있게 됩니다. 이 글 서두에 제시된 두 가지 공식은 사실상 모든 계산을 담당합니다. 다만, 실제 작동 지점에서 현실적인 마찰 추정치를 적용하고, 공장에서 실제로 생산 가능한 정수 톱니 수로 반올림해야 합니다.
모터 및 기어비 사양을 확정하기 전에 계산 검토를 원하는 한국 및 일본 OEM 설계팀을 위해 당사 엔지니어링 데스크에서 서비스를 제공합니다. 웜 기어비 계산 검토 사용 주기 대비 효율을 계산하고, 실제 작동 지점에서 현실적인 효율을 적용하여, 공장에서 표준 카탈로그 납기 내에 공급 가능한 최적의 톱니 비율을 추천합니다. 5:1부터 100:1까지의 표준 카탈로그 비율은 당사에서 다양한 제품군에 재고로 보유하고 있습니다. 단발 시동 및 다발 시동 웜 기어 세트 모듈 M1부터 M8까지, 그리고 카탈로그 범위 외의 맞춤형 비율은 도면을 기반으로 주문 제작됩니다.
엔진 기어비와 모터 크기에 대한 점검이 필요하신가요?
출력 토크, 출력 RPM 및 듀티 사이클을 보내주시면, 전체 계산을 실행하여 정수 톱니 쌍을 추천해 드리고, 실제로 필요한 모터 출력을 알려드립니다. 일반적으로 한국 근무일 기준 하루 이내에 처리됩니다.
편집자: Cxm


























