Rasio dan Perhitungan Roda Gigi Cacing — Rumus, Contoh, Kasus Nyata
Perhitungan di balik pasangan cacing dan roda cacing, tiga contoh yang dikerjakan, dan realitas gigi bilangan bulat yang merusak rasio buku teks yang rapi.
Rasio roda gigi cacing adalah jumlah gigi roda dibagi dengan jumlah ulir cacing: i = Z₂ / Z₁. Ulir cacing satu ulir yang berpasangan dengan roda 40 gigi menghasilkan rasio 40:1. Ulir cacing 4 ulir pada roda yang sama menghasilkan rasio 10:1. Efisiensi diatur oleh sudut ulir dan sudut gesekan melalui η = tan(λ) / tan(λ + φ) — biasanya 60 hingga 70 persen untuk penggerak satu ulir dengan rasio tinggi, 85 hingga 92 persen untuk penggerak multi-ulir dengan rasio rendah. Torsi input yang dibutuhkan sama dengan torsi output dibagi dengan (rasio × efisiensi), dan jumlah gigi berupa bilangan bulat berarti rasio yang sebenarnya Anda dapatkan jarang sama persis dengan angka yang Anda ketikkan dalam lembar spesifikasi.
Dua rumus yang selalu kembali ke setiap worm drive
Lupakan sejenak daftar panjang persamaan pitch dan modul. Dua rumus menentukan 90 persen keputusan desain pada pasangan ulir dan roda gigi cacing, dan sebagian besar kesalahan perhitungan di lapangan berasal dari kesalahan penerapan kedua rumus ini — bukan dari geometri tingkat lanjut.
Rumus 1 — Rasio reduksi (kinematik)
i = Z₂ / Z₁
Di mana Z₁ adalah jumlah ulir cacing (1, 2, 3, 4, terkadang 6) dan Z₂ adalah jumlah gigi roda. Ini murni geometri — material dan pelumas tidak termasuk dalam persamaan.
Rumus 2 — Efisiensi mekanik
η = tan(λ) / tan(λ + φ)
Di mana λ adalah sudut ulir cacing (fungsi dari jumlah ulir awal dan diameter ulir cacing) dan φ adalah sudut gesekan kontak (5 hingga 8 derajat untuk baja-pada-perunggu yang terlumasi dengan baik, 10 hingga 15 derajat untuk pelumasan yang buruk). Di sinilah material, penyelesaian permukaan, dan kimia pelumas berperan.
Alasan mengapa kedua rumus ini sangat penting adalah karena keduanya menangkap pertukaran utama pada roda gigi cacing — rasio tinggi berarti efisiensi rendah, rasio rendah berarti efisiensi tinggi, dan Anda tidak dapat memiliki keduanya dalam satu set yang sama. Rumus kedua menjelaskan biaya tersembunyi dari rumus pertama.

Membaca rumus rasio dengan benar
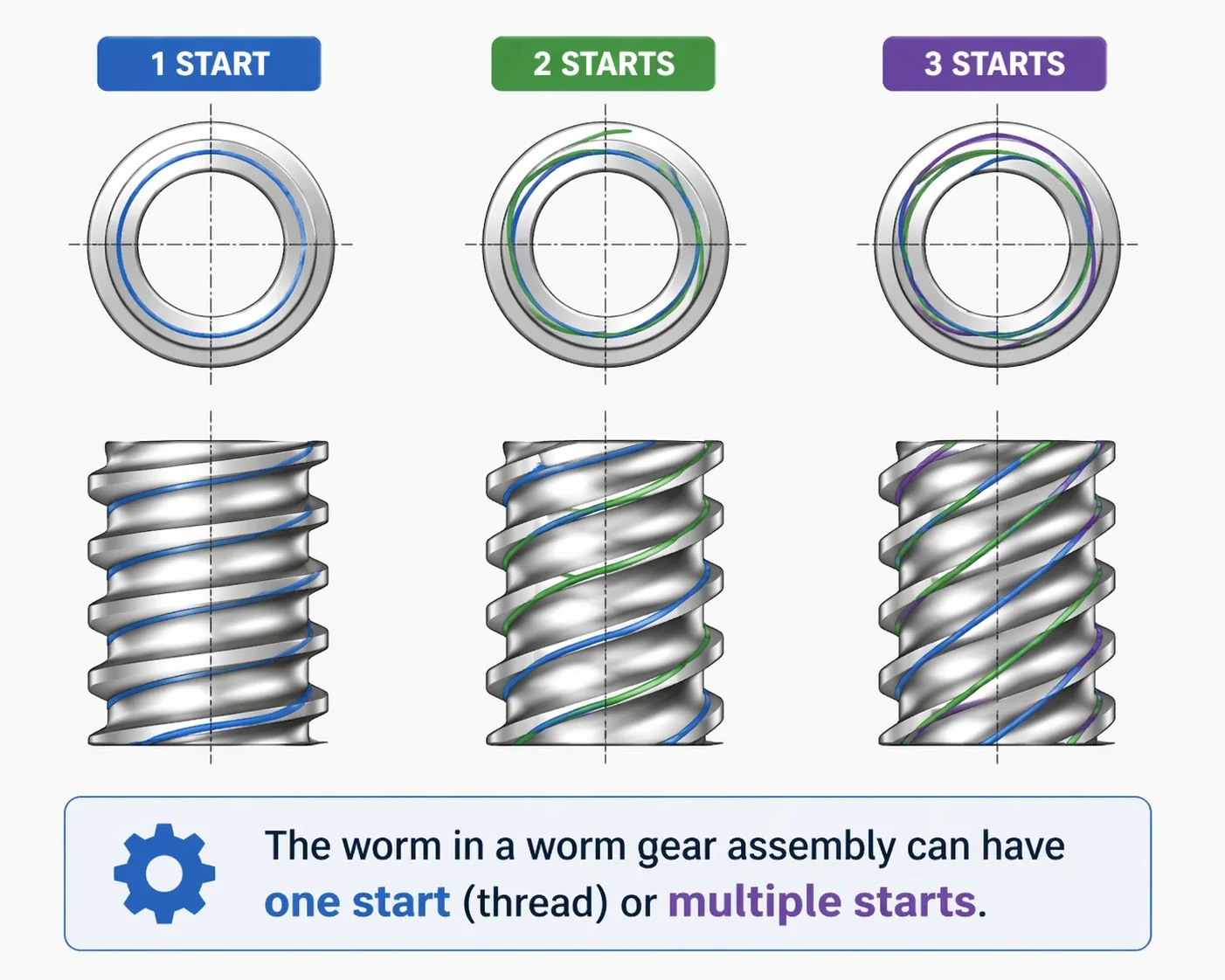
Z₁ menghitung jumlah awal ulir heliks pada ulir cacing — bukan jumlah total puncak ulir yang terlihat pada satu posisi keliling. Lihatlah ujung ulir cacing dari depan. Ulir cacing dengan satu awalan menunjukkan satu ulir yang melingkar ke bawah poros. Ulir cacing dengan dua awalan menunjukkan dua ulir yang melilit secara paralel, dengan pergeseran 180 derajat. Ulir cacing dengan empat awalan menunjukkan empat ulir paralel dengan jarak 90 derajat. Petunjuk visualnya adalah jumlah ulir terpisah yang dapat Anda lacak dari satu ujung ulir cacing ke ujung lainnya.
Z₂ menghitung jumlah gigi roda dengan cara konvensional — jumlah total gigi di sekeliling keliling roda. Roda dengan 40 gigi memiliki 40 gigi. Jumlahnya adalah bilangan bulat karena kebutuhan fisik; Anda tidak mungkin memiliki 40,5 gigi.
Jebakan bilangan bulat yang merusak rasio buku teks yang rapi.
Baik Z₁ maupun Z₂ harus berupa bilangan bulat, dan batasan ini lebih penting daripada yang diakui oleh sebagian besar kalkulator. Jika pelanggan meminta "tepat 35:1," bagian teknik kami harus memberi tahu mereka bahwa mereka akan mendapatkan salah satu dari tiga rasio praktis terdekat: Z₂ = 35 dengan Z₁ = 1 memberikan 35:1 tepat, Z₂ = 70 dengan Z₁ = 2 memberikan 35:1 tepat, atau Z₂ = 36 dengan Z₁ = 1 memberikan 36:1 (selisih 2,9 persen). Pilihannya bergantung pada kebutuhan aplikasi lainnya — Z₂ = 35 cocok untuk penggerak satu putaran, Z₂ = 70 menggandakan diameter roda pada modul yang sama, dan Z₂ = 36 adalah kompromi kecil yang memungkinkan Anda menggunakan ukuran roda yang lebih umum.
Meminta rasio 35,5:1 sama sekali tidak berhasil — tidak ada pasangan bilangan bulat yang menghasilkan rasio tepat tersebut. Angka yang tertera pada lembar desain harus dibulatkan ke angka yang benar-benar dapat diproduksi di pabrik. Untuk aplikasi OEM Korea dan Jepang di mana encoder dan kontrol motor di hilir mengasumsikan rasio roda gigi yang tepat, pembulatan ini harus dilakukan pada tahap desain, bukan setelah komponen dibuat.
Bagaimana efisiensi muncul dari sudut pandang utama
Sudut ulir λ adalah sudut antara heliks ulir cacing dan bidang yang tegak lurus terhadap sumbu cacing. Untuk cacing dengan satu ulir dan diameter ulir yang kecil, λ mungkin berkisar antara 3 hingga 5 derajat. Untuk cacing dengan empat ulir dan diameter ulir serta modul yang sama, λ meningkat menjadi 15 hingga 20 derajat. Hubungannya bersifat geometris: semakin banyak ulir pada modul yang sama berarti heliksnya semakin curam.
Masukkan angka ke dalam rumus efisiensi dan pertimbangan untung rugi akan menjadi konkret. Asumsikan sudut gesekan φ = 6 derajat, yang realistis untuk baja-pada-perunggu-fosfor yang terlumasi dengan baik:
Bentuk kurva sangat penting. Peningkatan sudut ulir dari 3° menjadi 10° hampir menggandakan efisiensi. Peningkatan dari 20° menjadi 30° hampir tidak memberikan perbedaan signifikan. Titik optimal untuk penggerak multi-start efisiensi tinggi berada di sekitar sudut ulir 15 hingga 20 derajat — di luar itu, efisiensi akan menurun dan Anda mulai kehilangan lebar permukaan roda yang membuat penggerak tersebut dapat diservis. Sebagian besar pasangan ulir cacing dan roda gigi cacing yang tercantum dalam katalog terbagi dalam dua kelompok: 3 hingga 5 derajat (penguncian otomatis rasio tinggi) atau 12 hingga 18 derajat (penggerak efisiensi rasio menengah).
Kesalahan yang sering saya lihat: seorang desainer membaca "η = 70 persen" dari katalog pabrikan dan memperlakukannya sebagai konstanta untuk menentukan ukuran motor. Padahal tidak. Angka 70 persen adalah efisiensi terukur pada beban dan kecepatan terukur. Pada beban sepersepuluh, torsi gesekan di dalam gearbox tetap hampir konstan sementara torsi berguna turun hingga sepuluh kali lipat — efisiensi terukur dapat turun di bawah 30 persen. Selalu tentukan ukuran berdasarkan titik operasi aktual, bukan angka pada label. Jika Anda hanya memiliki beban ringan dalam siklus kerja, persentase yang harus Anda masukkan ke dalam perhitungan torsi input adalah angka beban parsial, bukan angka katalog.
Contoh soal 1 — Penggerak sabuk konveyor
Konveyor sabuk datar mengangkut 80 kg produk dengan kecepatan 0,5 m/s sepanjang jalur 40 m. Pulley penggeraknya berdiameter 200 mm. Pelanggan menginginkan pengoperasian intermiten (40 persen aktif, 60 persen nonaktif) dan penggerak yang senyap. Penguncian otomatis tidak diperlukan karena sabuknya horizontal.
Penjelasan langkah demi langkah di bawah ini menunjukkan setiap tahapan perhitungan mulai dari gaya sabuk hingga pemilihan motor. Prosedur yang sama berlaku untuk setiap perhitungan ukuran konveyor — satu-satunya yang berubah adalah angka inputnya.

Perhatikan keputusan pembulatan pada langkah 5 — rasio aritmatika yang tepat adalah 29,4:1, tetapi rasio gigi-bilangan bulat praktis terdekat adalah 30:1, yang menghasilkan kecepatan sabuk yang sedikit lebih lambat. Pelanggan menerima kompromi tersebut tanpa perbedaan yang terlihat pada keluaran konveyor. Ini normal untuk penggerak industri.
Contoh soal 2 — Penggerak drum pengangkat

Dongkrak bengkel kecil ini mampu mengangkat hingga 500 kg pada drum dengan radius 100 mm. Kecepatan pengangkatan ditentukan pada 6 m/menit. Penguncian otomatis wajib dilakukan karena beban yang jatuh akan menjadi bahaya keselamatan. Pelanggan ingin menggunakan motor tiga fasa standar 1.400 rpm.
Penguncian otomatis menghilangkan ulir cacing multi-start — kita terpaksa menggunakan desain 1-start dengan sudut ulir yang rendah, menerima konsekuensi penurunan efisiensi.
Dua hal menonjol dari perhitungan ini. Pertama, penalti efisiensi untuk penguncian otomatis sangat besar — sekitar 67 persen daya input berubah menjadi panas pada penggerak. Kedua, kebutuhan daya motor (3 kW) jauh lebih tinggi daripada yang dibutuhkan beban yang sama pada reduktor sudut kanan heliks efisiensi tinggi (mungkin 1,5 kW). Pelanggan membayar penguncian otomatis dengan listrik tambahan selama masa pakai kerekan. Untuk kerekan bengkel yang beroperasi mungkin 200 jam per tahun, kompromi tersebut dapat diterima. Namun untuk kerekan produksi 24 jam, hal itu tidak dapat diterima — solusi yang tepat adalah reduktor heliks ditambah rem mekanis terpisah.
Contoh soal 3 — Pengindeksan meja putar
Meja pengindeksan 4 stasiun memposisikan perlengkapan pengelasan rangka jok otomotif. Setiap stasiun menampung 12 kg, massa total meja 80 kg, radius meja 400 mm. Waktu pengindeksan per stasiun adalah 1,2 detik (rotasi 90 derajat). Torsi penahan antar gerakan harus tahan terhadap dorongan yang tidak disengaja, tetapi penggeraknya sendiri ditahan secara elektrik oleh rem servo — penguncian otomatis diinginkan tetapi tidak wajib.
Perhitungan ini bersifat dinamis, bukan statis. Beban dominan adalah percepatan massa meja melalui 90 derajat dalam 1,2 detik — torsi puncak terjadi selama percepatan, bukan selama rotasi stabil. Aplikasi servo juga membutuhkan backlash yang lebih rendah daripada contoh konveyor atau kerekan.
Profil percepatan mengasumsikan kemiringan kecepatan segitiga — 0,6 detik pertama berakselerasi, 0,6 detik terakhir melambat. Kecepatan sudut puncak di titik tengah adalah 2 × 0,785 rad / 1,2 s = 1,31 rad/s. Percepatan sudut puncak adalah 1,31 / 0,6 = 2,18 rad/s².
Kesimpulannya: aplikasi pengindeksan dinamis menjalankan perhitungan melalui torsi akselerasi, bukan torsi keadaan tunak. Momen inersia polar dari meja itu sendiri seringkali mendominasi massa benda kerja, terutama pada meja putar baja berat. Pemilihan servo harus memenuhi torsi puncak, bukan torsi rata-rata — kegagalan dalam hal ini adalah alasan paling umum mengapa prototipe pengindeksan macet selama siklus pertama.
Kesalahan perhitungan umum yang merusak desain
Mencampuradukkan Z₁ dan Z₂. Sejumlah gambar pertama yang mengejutkan muncul dengan ulir cacing dan jumlah gigi roda yang tertukar — seseorang menulis jumlah gigi roda di tempat rumus seharusnya mencantumkan ulir cacing. Hasilnya adalah rasio terhitung 1/40, bukan 40, yang membuat perhitungan terlihat tidak masuk akal dan menghentikan desain sepenuhnya. Selalu beri label dengan jelas: Z₁ untuk ulir cacing, Z₂ untuk roda.
Lupa membagi dengan efisiensi. Rasio dasar memberikan hubungan kinematik antara kecepatan input dan output. Menerjemahkan itu ke torsi membutuhkan pembagian dengan efisiensi. Jika Anda mengabaikan pembagi efisiensi, Anda akan menentukan motor yang terlalu kecil. Penggerak akan macet pada beban nominal. Torsi input = torsi output ÷ (rasio × efisiensi), selalu.
Memperlakukan efisiensi sebagai konstanta. Efisiensi terukur yang dipublikasikan adalah pada beban terukur. Efisiensi pada beban ringan jauh lebih rendah karena torsi gesekan di dalam gearbox tetap relatif konstan sementara torsi yang bermanfaat menyusut. Selalu gunakan efisiensi pada titik operasi, bukan angka yang tertera di judul.
Menggunakan torsi statis untuk aplikasi dinamis. Meja pengindeksan, kerekan dengan beban kejut, dan penggerak apa pun dengan siklus mulai-berhenti yang sering harus dirancang untuk torsi akselerasi puncak, bukan torsi kondisi tunak. Nilai puncak dapat 2 hingga 4 kali nilai tunak tergantung pada waktu siklus.
Menuntut rasio non-integer. Meminta rasio 47,3:1 tidak memiliki solusi. Bulatkan ke rasio gigi bilangan bulat praktis terdekat pada tahap desain. Jika pengontrol di hilir membutuhkan rasio yang tepat, rancang rasio roda gigi terlebih dahulu dan biarkan penskalaan pengontrol menyesuaikan dengan rasio aktual.
Melupakan faktor layanan. Penggerak yang ukurannya tepat sesuai dengan torsi nominal yang dihitung tidak memiliki margin untuk variasi tegangan saluran, penuaan, kelebihan beban sesekali, atau siklus termal. Terapkan faktor servis antara 1,3 (ringan dan terputus-putus) dan 2,5 (beban kejut berat) sebelum memilih motor dan set roda gigi.
Pertanyaan yang sering diajukan
T: Apakah rasio roda gigi sama dengan rasio reduksi?
Untuk pasangan ulir cacing dan roda gigi cacing di mana cacing adalah penggeraknya, ya — rasio gigi i = Z₂/Z₁ sama dengan rasio pengurangan kecepatan. Poros keluaran berputar sekali untuk setiap i putaran masukan. Dalam tata letak yang jarang terjadi di mana roda menggerakkan cacing (desain multi-start yang dapat digerakkan balik yang digunakan sebagai kopling overrunning), rumus rasio gigi tetap sama tetapi interpretasi kinematiknya berbalik. Roda gigi cacing adalah kasus standar dan satu-satunya yang membutuhkan perlakuan yang tidak ambigu.
T: Bagaimana sudut ulir dihitung dari dimensi cacing?
Sudut ulir λ = arctan( L / (π × d₁) ), di mana L adalah ulir (pergerakan aksial per putaran = Z₁ × jarak ulir aksial) dan d₁ adalah diameter ulir cacing. Untuk ulir cacing 1 ulir dengan jarak ulir aksial 9,42 mm dan diameter ulir 36 mm: L = 9,42 mm, π × d₁ = 113,1 mm, sehingga λ = arctan(9,42/113,1) = 4,76°. Ulir cacing multi-ulir memiliki ulir yang proporsional lebih besar — ulir cacing 2 ulir dengan jarak ulir dan diameter yang sama akan memiliki λ = arctan(18,84/113,1) = 9,46°.
T: Berapakah sudut gesekan tipikal untuk rangkaian roda gigi cacing industri?
Untuk baja-pada-perunggu-fosfor yang dilumasi dengan baik menggunakan oli roda gigi sintetis, sudut gesekan φ kira-kira 5 hingga 7 derajat (μ = 0,087 hingga 0,12). Untuk oli mineral pada suhu sedang, 7 hingga 9 derajat. Untuk pelumasan yang buruk atau kondisi pengoperasian awal, 10 hingga 15 derajat. Kecepatan geser memengaruhi gesekan: pada kecepatan sangat rendah (di bawah 0,5 m/s), pelumasan batas mendominasi dan φ meningkat; pada kecepatan sedang (1 hingga 5 m/s), efek hidrodinamik menurunkan φ; pada kecepatan sangat tinggi, pemanasan mulai mendorong φ kembali naik. Sebagian besar kalkulator industri mengasumsikan nilai konstan 6 derajat sebagai perkiraan awal.
T: Bagaimana cara mendapatkan rasio non-standar yang tepat seperti 50,5:1?
Anda tidak bisa — tidak dari satu tahap cacing dan roda gigi cacing saja. Rasio Z₂/Z₁ harus berupa rasio bilangan bulat, dan 50,5 = 101/2, jadi satu-satunya solusi satu tahap adalah Z₁ = 2, Z₂ = 101. Roda gigi dengan 101 gigi memang tidak biasa tetapi dapat diproduksi. Pendekatan yang lebih umum adalah menggunakan dua tahap: tahap cacing 50:1 diikuti oleh tahap roda gigi lurus atau planet kecil untuk menyempurnakan rasio keseluruhan. Penggerak dua tahap juga mencapai rasio di atas 200:1 yang tidak dapat dicapai dengan mudah oleh set roda gigi cacing satu tahap praktis mana pun.
T: Mengapa angka efisiensi yang saya ukur lebih rendah daripada prediksi rumus?
Rumus η = tan(λ)/tan(λ+φ) hanya memberikan efisiensi jala roda gigi. Rumus lengkapnya adalah... reduktor roda gigi cacing Selain itu, terdapat juga kerugian bantalan, gesekan seal oli, dan kerugian pengadukan oli yang tidak tercakup dalam rumus. Efisiensi penggerak total biasanya 5 hingga 10 poin persentase di bawah angka persambungan roda gigi. Untuk unit dengan prediksi η_mesh = 70 persen, perkirakan efisiensi penggerak keseluruhan sekitar 60 hingga 65 persen. Angka yang diukur di laboratorium di bawah prediksi rumus adalah normal, bukan pertanda masalah.
T: Dapatkah rasio roda gigi cacing berubah seiring waktu karena keausan unit?
Tidak — rasio ditentukan oleh jumlah gigi dan tetap konstan selama masa pakai rakitan. Yang berubah akibat keausan adalah celah (kelonggaran rotasi kecil antara roda gigi cacing dan roda gigi roda gigi di bawah beban bolak-balik) dan mungkin efisiensi (karena kekasaran permukaan dan kondisi pelumas berubah). Rasio itu sendiri bersifat geometris dan tidak berubah selama gigi dan ulir masih ada.
T: Seberapa akurat prediksi efisiensi berdasarkan rumus ini?
Untuk penentuan ukuran awal, prediksi rumus akurat hingga ±5 poin persentase jika Anda memilih sudut gesekan yang realistis. Untuk pemilihan motor akhir pada aplikasi kritis, mintalah data uji coba dari pemasok — sebagian besar produsen terkemuka termasuk kami dapat menyediakan kurva efisiensi terukur pada berbagai titik beban dan kecepatan. Rumus adalah alat yang tepat untuk desain awal; data uji coba adalah alat yang tepat untuk komitmen akhir.
Perhitungan pada pasangan roda gigi cacing dan ulir cacing cukup sederhana tetapi tidak memberi toleransi kesalahan. Jika rumus rasio dasarnya salah, maka kesalahan perhitungan akan langsung terlihat. Jika perhitungan efisiensinya salah, maka produk akan dikirim, beroperasi dengan suhu tinggi, garansi habis, dan kesalahan tersebut akan tersembunyi selama berbulan-bulan hingga produk yang dikembalikan dari lapangan mulai berdatangan. Dua rumus di awal artikel ini pada dasarnya menanggung seluruh beban — rumus tersebut hanya perlu diterapkan pada titik operasi sebenarnya, dengan perkiraan gesekan yang realistis, dan dibulatkan ke jumlah gigi bilangan bulat yang sebenarnya dapat diproduksi oleh pabrik.
Bagi tim desain OEM Korea dan Jepang yang menginginkan perhitungan ditinjau sebelum menentukan spesifikasi motor dan rasio, bagian teknik kami menjalankan sebuah Tinjauan perhitungan rasio roda gigi cacing Sesuai dengan siklus kerja Anda, menerapkan efisiensi realistis pada titik operasi aktual, dan merekomendasikan pasangan gigi yang dapat dikirim pabrik sesuai dengan waktu tunggu standar katalog. Rasio standar katalog dari 5:1 hingga 100:1 tersedia di seluruh stok kami. set roda gigi cacing ulir tunggal dan ulir ganda untuk modul M1 hingga M8, dan rasio khusus di luar rentang katalog dibuat berdasarkan pesanan sesuai gambar.
Perlu pengecekan ulang rasio dan ukuran motor Anda?
Kirimkan torsi keluaran, putaran per menit (rpm) keluaran, dan siklus kerja Anda. Kami akan menjalankan perhitungan lengkap, merekomendasikan pasangan gigi bilangan bulat, dan memberi tahu Anda berapa daya motor yang sebenarnya dibutuhkan berdasarkan perhitungan tersebut — biasanya dalam satu hari kerja Korea.
Editor: Cxm


























