वर्म गियर अनुपात और गणना — सूत्र, उदाहरण, वास्तविक मामले
वर्म और वर्म व्हील जोड़ी के पीछे का अंकगणित, तीन हल किए गए उदाहरण, और पूर्णांक-दांत की वास्तविकता जो पाठ्यपुस्तकों में दिए गए अनुपातों को पूरी तरह से बिगाड़ देती है।
वर्म गियर अनुपात पहिए के दांतों की संख्या को वर्म गियर के चक्करों की संख्या से भाग देने पर प्राप्त होता है: i = Z₂ / Z₁। 40 दांतों वाले पहिए के साथ सिंगल-स्टार्ट वर्म गियर लगाने पर 40:1 का अनुपात प्राप्त होता है। उसी पहिए पर 4-स्टार्ट वर्म गियर लगाने पर 10:1 का अनुपात प्राप्त होता है। दक्षता लीड कोण और घर्षण कोण द्वारा निर्धारित होती है, सूत्र η = tan(λ) / tan(λ + φ) है — उच्च अनुपात वाले सिंगल-स्टार्ट ड्राइव के लिए आमतौर पर 60 से 70 प्रतिशत और निम्न अनुपात वाले मल्टी-स्टार्ट ड्राइव के लिए 85 से 92 प्रतिशत होती है। आवश्यक इनपुट टॉर्क आउटपुट टॉर्क को (अनुपात × दक्षता) से भाग देने पर प्राप्त होता है, और पूर्णांक दांतों की संख्या का अर्थ है कि आपको वास्तव में जो अनुपात प्राप्त होता है वह शायद ही कभी विनिर्देश पत्रक में दर्ज की गई सटीक संख्या के बराबर होता है।
प्रत्येक वर्म ड्राइव दो सूत्रों पर आधारित होती है।
पिच और मॉड्यूल समीकरणों की लंबी सूचियों को कुछ समय के लिए भूल जाइए। वर्म और वर्म व्हील पेयर के डिजाइन संबंधी 90 प्रतिशत निर्णय दो सूत्रों द्वारा निर्धारित होते हैं, और क्षेत्र में होने वाली अधिकांश गणना संबंधी त्रुटियां इन दोनों सूत्रों के गलत प्रयोग से होती हैं - न कि उन्नत ज्यामिति से।
सूत्र 1 — कमी अनुपात (गतिज)
i = Z₂ / Z₁
यहां Z₁ वर्म स्टार्ट की संख्या है (1, 2, 3, 4, कभी-कभी 6) और Z₂ पहिए के दांतों की संख्या है। यह विशुद्ध रूप से ज्यामिति पर आधारित है — इसमें पदार्थ और स्नेहक का कोई स्थान नहीं है।
सूत्र 2 — यांत्रिक दक्षता
η = tan(λ) / tan(λ + φ)
यहां λ वर्म का लीड कोण है (जो स्टार्ट और वर्म पिच व्यास पर निर्भर करता है) और φ संपर्क का घर्षण कोण है (अच्छी तरह से चिकनाई युक्त स्टील-ऑन-ब्रॉन्ज़ के लिए 5 से 8 डिग्री, खराब चिकनाई के लिए 10 से 15 डिग्री)। यहीं पर सामग्री, सतह की फिनिश और स्नेहक रसायन का महत्व सामने आता है।
इन दोनों सूत्रों का इतना महत्व इसलिए है क्योंकि ये वर्म गियरिंग के मूल ट्रेड-ऑफ को दर्शाते हैं — उच्च अनुपात का अर्थ है कम दक्षता, निम्न अनुपात का अर्थ है उच्च दक्षता, और ये दोनों एक साथ नहीं हो सकते। दूसरा सूत्र पहले सूत्र की छिपी हुई लागत को स्पष्ट करता है।

अनुपात सूत्र को सही ढंग से पढ़ना
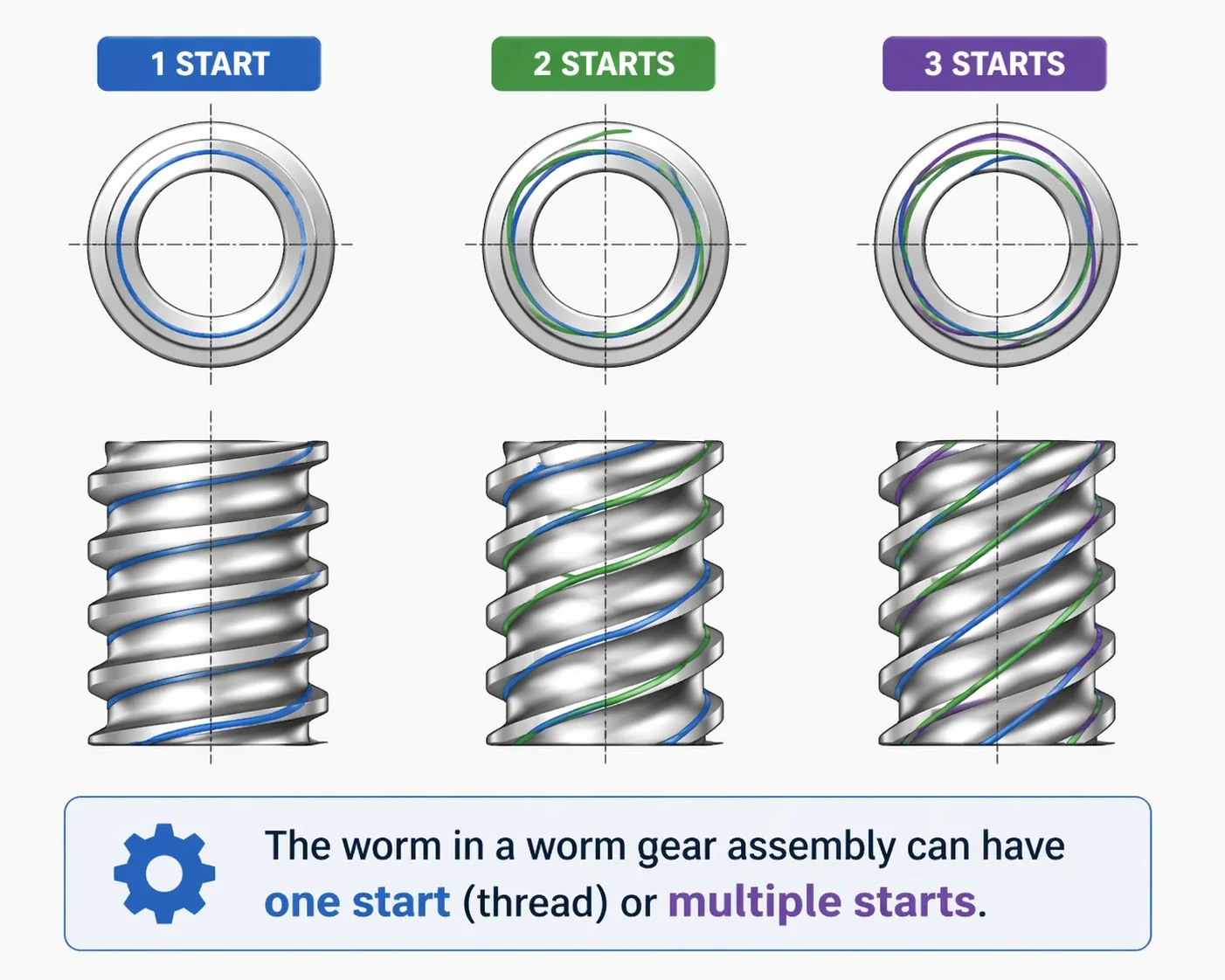
Z₁ वर्म पर सर्पिलाकार धागों की शुरुआत की संख्या गिनता है, न कि किसी एक परिधीय स्थिति पर दिखाई देने वाले धागों की कुल चोटियों की संख्या। वर्म को सिरे से देखें। एक सिंगल-स्टार्ट वर्म में एक धागा शाफ्ट पर सर्पिलाकार रूप में नीचे की ओर जाता हुआ दिखाई देता है। 2-स्टार्ट वर्म में दो धागे समानांतर रूप से 180 डिग्री के कोण पर लिपटे हुए दिखाई देते हैं। 4-स्टार्ट वर्म में चार समानांतर धागे 90 डिग्री के अंतराल पर दिखाई देते हैं। दृश्य संकेत वर्म के एक सिरे से दूसरे सिरे तक आप जितने अलग-अलग धागों का पता लगा सकते हैं, उनकी संख्या है।
Z₂ पहिये के दांतों की गणना पारंपरिक तरीके से करता है — पहिये की परिधि के चारों ओर कुल दांतों की संख्या। 40 दांतों वाले पहिये में 40 दांत होते हैं। भौतिक आवश्यकता के कारण यह संख्या पूर्णांक है; 40.5 दांत नहीं हो सकते।
पूर्णांकों का वह जाल जो पाठ्यपुस्तकों में दिए गए सटीक अनुपातों को बिगाड़ देता है
Z₁ और Z₂ दोनों पूर्णांक होने चाहिए, और यह शर्त अधिकांश कैलकुलेटरों की अपेक्षा कहीं अधिक महत्वपूर्ण है। यदि कोई ग्राहक "ठीक 35:1" का अनुपात मांगता है, तो हमारे इंजीनियरिंग विभाग को उन्हें बताना होगा कि उन्हें तीन निकटतम व्यावहारिक अनुपातों में से एक मिलेगा: Z₂ = 35 और Z₁ = 1 से ठीक 35:1 का अनुपात प्राप्त होता है, Z₂ = 70 और Z₁ = 2 से ठीक 35:1 का अनुपात प्राप्त होता है, या Z₂ = 36 और Z₁ = 1 से 36:1 का अनुपात प्राप्त होता है (2.9 प्रतिशत का अतिरिक्त मान)। चुनाव इस बात पर निर्भर करता है कि एप्लिकेशन को और क्या चाहिए - Z₂ = 35 सिंगल-स्टार्ट ड्राइव के लिए उपयुक्त है, Z₂ = 70 समान मॉड्यूल पर व्हील का व्यास दोगुना कर देता है, और Z₂ = 36 एक छोटा सा समझौता है जो आपको अधिक सामान्य व्हील आकार का उपयोग करने की अनुमति देता है।
35.5:1 का अनुपात मांगना संभव नहीं है — ऐसा कोई पूर्णांक युग्म नहीं है जो ठीक यही अनुपात दे सके। डिज़ाइन शीट पर दिए गए सटीक मान को ऐसे पूर्णांक में बदलना पड़ता है जिसे फ़ैक्टरी वास्तव में काट सके। कोरियाई और जापानी OEM अनुप्रयोगों में, जहाँ डाउनस्ट्रीम एनकोडर और मोटर नियंत्रण एक सटीक गियर अनुपात मानते हैं, यह पूर्णांकन डिज़ाइन चरण में ही किया जाना चाहिए, न कि पुर्जे बनने के बाद।
लीड कोण से दक्षता कैसे प्राप्त होती है
लीड कोण λ, वर्म थ्रेड हेलिक्स और वर्म अक्ष के लंबवत समतल के बीच का कोण होता है। कम पिच व्यास वाले सिंगल-स्टार्ट वर्म के लिए, λ का मान 3 से 5 डिग्री हो सकता है। समान पिच व्यास और मॉड्यूल वाले 4-स्टार्ट वर्म के लिए, λ का मान 15 से 20 डिग्री तक बढ़ जाता है। यह संबंध ज्यामितीय है: समान मॉड्यूल पर जितने अधिक स्टार्ट होंगे, हेलिक्स उतना ही अधिक ढलान वाला होगा।
दक्षता सूत्र में संख्याएँ डालें और ट्रेड-ऑफ स्पष्ट हो जाता है। घर्षण कोण φ = 6 डिग्री मान लें, जो अच्छी तरह से चिकनाई युक्त स्टील-ऑन-फॉस्फोर-ब्रॉन्ज़ के लिए यथार्थवादी है:
वक्र का आकार मायने रखता है। 3° से 10° तक लीड कोण बढ़ाने से दक्षता लगभग दोगुनी हो जाती है। 20° से 30° तक बढ़ाने से दक्षता में मामूली अंतर आता है। उच्च दक्षता वाले मल्टी-स्टार्ट ड्राइव के लिए सबसे उपयुक्त लीड कोण 15 से 20 डिग्री के आसपास होता है - इससे आगे बढ़ने पर दक्षता में गिरावट आने लगती है और ड्राइव की कार्यक्षमता कम होने लगती है। कैटलॉग में उपलब्ध अधिकांश वर्म और वर्म व्हील जोड़े दो श्रेणियों में आते हैं: 3 से 5 डिग्री (उच्च अनुपात वाले सेल्फ-लॉकिंग) या 12 से 18 डिग्री (मध्यम अनुपात वाले दक्षता-चालित)।
एक गलती जो मैं अक्सर देखता हूँ: डिज़ाइनर किसी निर्माता की कैटलॉग से “η = 70 प्रतिशत” पढ़ता है और मोटर का आकार निर्धारित करने के लिए इसे एक स्थिर मान लेता है। यह स्थिर नहीं है। 70 प्रतिशत का आंकड़ा रेटेड लोड और रेटेड गति पर रेटेड दक्षता है। एक-दसवें लोड पर, गियरबॉक्स के अंदर घर्षण टॉर्क लगभग स्थिर रहता है जबकि उपयोगी टॉर्क दस गुना कम हो जाता है - मापी गई दक्षता 30 प्रतिशत से नीचे गिर सकती है। हमेशा वास्तविक परिचालन बिंदु के अनुसार आकार निर्धारित करें, न कि कैटलॉग नंबर के अनुसार। यदि आपके ड्यूटी साइकिल में केवल हल्का लोड है, तो इनपुट टॉर्क गणना में आपको जो प्रतिशत डालना चाहिए वह पार्ट-लोड नंबर है, न कि कैटलॉग नंबर।
हल किया गया उदाहरण 1 — कन्वेयर बेल्ट ड्राइव
एक फ्लैट बेल्ट कन्वेयर 40 मीटर लंबी लाइन पर 80 किलोग्राम उत्पाद को 0.5 मीटर/सेकंड की गति से ले जाता है। ड्राइव पुली का व्यास 200 मिमी है। ग्राहक को इंटरमिटेंट ड्यूटी (40 प्रतिशत चालू, 60 प्रतिशत बंद) और शांत ड्राइव की आवश्यकता है। बेल्ट क्षैतिज होने के कारण सेल्फ-लॉकिंग की आवश्यकता नहीं है।
नीचे दिए गए विवरण में बेल्ट बल से लेकर मोटर चयन तक की प्रत्येक गणितीय प्रक्रिया दिखाई गई है। यही प्रक्रिया किसी भी कन्वेयर साइजिंग अभ्यास के लिए लागू होती है - केवल इनपुट संख्याएँ ही बदलती हैं।

चरण 5 पर राउंडिंग के निर्णय पर ध्यान दें — सटीक अंकगणितीय अनुपात 29.4:1 है, लेकिन निकटतम व्यावहारिक पूर्णांक-दांत अनुपात 30:1 है, जिससे बेल्ट की गति थोड़ी धीमी हो जाती है। ग्राहक ने कन्वेयर आउटपुट पर कोई स्पष्ट अंतर देखे बिना इस समझौते को स्वीकार कर लिया। औद्योगिक ड्राइव के लिए यह सामान्य बात है।
हल किया गया उदाहरण 2 — होइस्ट ड्रम ड्राइव

एक छोटा कार्यशाला उपकरण 100 मिमी त्रिज्या वाले ड्रम पर 500 किलोग्राम तक का भार उठा सकता है। उठाने की गति 6 मीटर/मिनट निर्धारित है। स्व-लॉकिंग अनिवार्य है क्योंकि भार गिरने से सुरक्षा को खतरा हो सकता है। ग्राहक एक मानक 1,400 आरपीएम तीन-फेज मोटर का उपयोग करना चाहता है।
सेल्फ-लॉकिंग मल्टी-स्टार्ट वर्म्स को खत्म कर देती है - हमें कम लीड एंगल वाले 1-स्टार्ट डिज़ाइन को अपनाने के लिए मजबूर होना पड़ता है, जिससे दक्षता में कमी आती है।
इस गणना से दो बातें स्पष्ट होती हैं। पहली बात, सेल्फ-लॉकिंग के कारण दक्षता में भारी कमी आती है — इनपुट पावर का लगभग 67 प्रतिशत ड्राइव में ऊष्मा के रूप में परिवर्तित हो जाता है। दूसरी बात, मोटर की पावर आवश्यकता (3 kW) उच्च दक्षता वाले हेलिकल राइट-एंगल रिड्यूसर (शायद 1.5 kW) की तुलना में बहुत अधिक है, जो समान लोड के लिए आवश्यक होती। ग्राहक को होइस्ट के पूरे जीवनकाल में अतिरिक्त बिजली के रूप में सेल्फ-लॉकिंग की कीमत चुकानी पड़ती है। कार्यशाला में साल में लगभग 200 घंटे चलने वाले होइस्ट के लिए यह समझौता स्वीकार्य है। लेकिन 24 घंटे चलने वाले उत्पादन होइस्ट के लिए यह स्वीकार्य नहीं होगा — ऐसे में हेलिकल रिड्यूसर के साथ एक अलग मैकेनिकल ब्रेक का उपयोग करना ही सही समाधान है।
उदाहरण 3 — रोटरी टेबल की इंडेक्सिंग
एक 4-स्टेशन इंडेक्सिंग टेबल ऑटोमोटिव सीट-फ्रेम वेल्डिंग फिक्स्चर को पोजीशन करती है। प्रत्येक स्टेशन 12 किलोग्राम भार सहन कर सकता है, टेबल का कुल द्रव्यमान 80 किलोग्राम और त्रिज्या 400 मिमी है। प्रत्येक स्टेशन पर इंडेक्सिंग का समय 1.2 सेकंड (90 डिग्री रोटेशन) है। गतियों के बीच होल्डिंग टॉर्क को आकस्मिक धक्कों का प्रतिरोध करना चाहिए, लेकिन ड्राइव स्वयं एक सर्वो ब्रेक द्वारा विद्युत रूप से नियंत्रित होती है - स्व-लॉकिंग वांछनीय है, लेकिन अनिवार्य नहीं है।
यह गणना गतिशील है, स्थिर नहीं। प्रमुख भार 1.2 सेकंड में टेबल के द्रव्यमान का 90 डिग्री तक त्वरण है - अधिकतम टॉर्क त्वरण के दौरान उत्पन्न होता है, स्थिर घूर्णन के दौरान नहीं। सर्वो अनुप्रयोगों में कन्वेयर या होइस्ट की तुलना में कम बैकलैश की आवश्यकता होती है।
त्वरण प्रोफ़ाइल एक त्रिकोणीय वेग रैंप मानती है — पहले 0.6 सेकंड में त्वरण और अंतिम 0.6 सेकंड में मंदन। मध्यबिंदु पर अधिकतम कोणीय वेग 2 × 0.785 रेडियन / 1.2 सेकंड = 1.31 रेडियन/सेकंड है। अधिकतम कोणीय त्वरण 1.31 / 0.6 = 2.18 रेडियन/सेकंड² है।
निष्कर्ष: डायनामिक इंडेक्सिंग अनुप्रयोगों में गणना त्वरण टॉर्क के माध्यम से होती है, न कि स्थिर-अवस्था टॉर्क के माध्यम से। टेबल का ध्रुवीय जड़त्व आघूर्ण अक्सर वर्कपीस के द्रव्यमान पर हावी होता है, विशेष रूप से भारी स्टील रोटरी टेबलों पर। सर्वो का चयन अधिकतम टॉर्क को पूरा करने के लिए होना चाहिए, न कि औसत टॉर्क को - ऐसा न कर पाना ही इंडेक्सिंग प्रोटोटाइप के पहले चक्र के दौरान रुकने का सबसे आम कारण है।
डिजाइन को बर्बाद करने वाली सामान्य गणना संबंधी गलतियाँ
Z₁ और Z₂ में भ्रम होना। कई बार शुरुआती डिज़ाइनों में वर्म स्टार्ट और व्हील टीथ आपस में बदल जाते हैं - किसी ने व्हील टीथ की संख्या वहाँ लिख दी है जहाँ फ़ॉर्मूले में वर्म स्टार्ट की आवश्यकता होती है। इसका परिणाम यह होता है कि गणना किया गया अनुपात 40 के बजाय 1/40 हो जाता है, जिससे गणितीय गणना बेतुकी लगती है और डिज़ाइन रुक जाता है। हमेशा स्पष्ट रूप से लिखें: वर्म के लिए Z₁ और व्हील के लिए Z₂।
दक्षता से भाग देना भूल जाना। मूल अनुपात आपको इनपुट और आउटपुट गति के बीच गतिज संबंध बताता है। इसे टॉर्क में बदलने के लिए दक्षता से भाग देना आवश्यक है। यदि आप दक्षता भाजक को छोड़ देते हैं, तो आप एक बहुत छोटे मोटर का चयन कर रहे हैं। सामान्य भार के तहत ड्राइव रुक जाएगी। इनपुट टॉर्क = आउटपुट टॉर्क ÷ (अनुपात × दक्षता), हमेशा।
दक्षता को एक स्थिर मान के रूप में मानना। प्रकाशित रेटेड दक्षता रेटेड लोड पर आधारित होती है। हल्के लोड पर दक्षता काफी कम होती है क्योंकि गियरबॉक्स के अंदर घर्षण टॉर्क लगभग स्थिर रहता है जबकि उपयोगी टॉर्क कम हो जाता है। हमेशा ऑपरेटिंग-पॉइंट दक्षता का उपयोग करें, न कि शीर्षक में उल्लिखित संख्या का।
गतिशील अनुप्रयोगों के लिए स्थैतिक टॉर्क का उपयोग करना। इंडेक्सिंग टेबल, शॉक लोड वाले होइस्ट और बार-बार स्टार्ट-स्टॉप चक्र वाले किसी भी ड्राइव को पीक एक्सेलरेशन टॉर्क के लिए डिज़ाइन किया जाना चाहिए, न कि स्टेडी-स्टेट टॉर्क के लिए। चक्र समय के आधार पर पीक मान स्टेडी मान से 2 से 4 गुना अधिक हो सकता है।
गैर-पूर्णांक अनुपातों की मांग करना। 47.3:1 के अनुपात का कोई हल नहीं है। डिज़ाइन चरण में इसे निकटतम व्यावहारिक पूर्णांक-दांत अनुपात में राउंड करें। यदि डाउनस्ट्रीम नियंत्रक को सटीक अनुपात की आवश्यकता है, तो पहले गियर अनुपात डिज़ाइन करें और नियंत्रक स्केलिंग को वास्तविक अनुपात के अनुसार समायोजित होने दें।
सेवा कारक को भूल जाना। गणना किए गए नाममात्र टॉर्क के अनुरूप सटीक आकार वाले ड्राइव में लाइन वोल्टेज में उतार-चढ़ाव, पुराने होने, कभी-कभार होने वाले ओवरलोड या थर्मल साइक्लिंग के लिए कोई गुंजाइश नहीं होती है। मोटर और गियर सेट का चयन करने से पहले 1.3 (हल्का रुक-रुक कर होने वाला) और 2.5 (भारी झटके वाला भार) के बीच सर्विस फैक्टर लागू करें।
अक्सर पूछे जाने वाले प्रश्नों
प्रश्न: क्या गियर अनुपात और अपचयन अनुपात समान हैं?
वर्म और वर्म व्हील के युग्म के लिए, जहाँ वर्म चालक होता है, हाँ — गियर अनुपात i = Z₂/Z₁ गति कमी अनुपात के बराबर होता है। इनपुट शाफ्ट के प्रत्येक i चक्कर के लिए आउटपुट शाफ्ट एक बार घूमता है। कुछ दुर्लभ लेआउट में जहाँ व्हील वर्म को चलाता है (ओवररनिंग क्लच के रूप में उपयोग किए जाने वाले बैक-ड्राइवेबल मल्टी-स्टार्ट डिज़ाइन), गियर अनुपात सूत्र वही रहता है लेकिन गतिज व्याख्या उलट जाती है। वर्म-ड्राइविंग-व्हील मानक मामला है और एकमात्र ऐसा मामला है जिसके लिए स्पष्ट व्याख्या की आवश्यकता है।
प्रश्न: वर्म के आयामों से लीड कोण की गणना कैसे की जाती है?
लीड कोण λ = arctan( L / (π × d₁) ), जहाँ L लीड (प्रति परिक्रमण अक्षीय अग्रिम = Z₁ × अक्षीय पिच) है और d₁ वर्म पिच व्यास है। 9.42 मिमी अक्षीय पिच और 36 मिमी पिच व्यास वाले 1-स्टार्ट वर्म के लिए: L = 9.42 मिमी, π × d₁ = 113.1 मिमी, इसलिए λ = arctan(9.42/113.1) = 4.76°। मल्टी-स्टार्ट वर्म में आनुपातिक रूप से बड़ा लीड होता है — समान पिच और व्यास वाले 2-स्टार्ट वर्म के लिए λ = arctan(18.84/113.1) = 9.46° होगा।
प्रश्न: औद्योगिक वर्म गियर सेट के लिए सामान्य घर्षण कोण क्या होता है?
सिंथेटिक गियर ऑयल से अच्छी तरह से चिकनाई युक्त स्टील-ऑन-फॉस्फोर-ब्रॉन्ज़ के लिए, घर्षण कोण φ लगभग 5 से 7 डिग्री (μ = 0.087 से 0.12) होता है। मध्यम तापमान पर मिनरल ऑयल के लिए, यह 7 से 9 डिग्री होता है। कम चिकनाई या रनिंग-इन स्थितियों में, यह 10 से 15 डिग्री होता है। फिसलने की गति घर्षण को प्रभावित करती है: बहुत कम गति (0.5 मीटर/सेकंड से कम) पर, सीमा स्नेहन हावी होता है और φ धीरे-धीरे बढ़ता है; मध्यम गति (1 से 5 मीटर/सेकंड) पर, हाइड्रोडायनामिक प्रभाव φ को नीचे खींचते हैं; बहुत अधिक गति पर, तापन φ को फिर से ऊपर धकेलना शुरू कर देता है। अधिकांश औद्योगिक कैलकुलेटर प्रारंभिक अनुमान के रूप में 6 डिग्री का स्थिर मान लेते हैं।
प्रश्न: मुझे 50.5:1 जैसा सटीक गैर-मानक अनुपात कैसे प्राप्त होगा?
आप ऐसा नहीं कर सकते— एक ही वर्म और वर्म व्हील स्टेज से तो बिल्कुल नहीं। Z₂/Z₁ का अनुपात पूर्णांकों का अनुपात होना चाहिए, और 50.5 = 101/2, इसलिए एकमात्र एकल-चरण समाधान Z₁ = 2, Z₂ = 101 है। 101 दांतों वाला व्हील असामान्य है लेकिन निर्माण योग्य है। अधिक सामान्य तरीका दो चरणों का उपयोग करना है: एक 50:1 वर्म स्टेज जिसके बाद समग्र अनुपात को ठीक करने के लिए एक छोटा स्पर या प्लेनेटरी स्टेज होता है। दो-चरण ड्राइव 200:1 से ऊपर के अनुपात तक भी पहुँच सकते हैं, जो किसी भी व्यावहारिक एकल-चरण वर्म गियर सेट द्वारा आसानी से प्राप्त नहीं किया जा सकता है।
प्रश्न: मेरे द्वारा मापी गई दक्षता के आंकड़े सूत्र द्वारा अनुमानित आंकड़ों से कम क्यों आते हैं?
सूत्र η = tan(λ)/tan(λ+φ) केवल गियर-मेश दक्षता देता है। पूर्ण वर्म गियर रिड्यूसर इसमें बेयरिंग लॉस, ऑयल सील ड्रैग और ऑयल चर्निंग लॉस भी शामिल हैं जो फॉर्मूले में शामिल नहीं हैं। कुल ड्राइव दक्षता आमतौर पर गियर-मेश संख्या से 5 से 10 प्रतिशत अंक कम होती है। 70 प्रतिशत अनुमानित η_mesh वाली इकाई के लिए, कुल ड्राइव दक्षता लगभग 60 से 65 प्रतिशत रहने की उम्मीद है। फॉर्मूले के अनुमान से कम बेंच-मापे गए मान सामान्य हैं, समस्या का संकेत नहीं।
प्रश्न: क्या समय के साथ-साथ यूनिट के घिसने से वर्म गियर का अनुपात बदल सकता है?
नहीं—यह अनुपात दांतों की संख्या द्वारा निर्धारित होता है और असेंबली के पूरे जीवनकाल में स्थिर रहता है। घिसाव के साथ जो परिवर्तन होता है वह बैकलैश (रिवर्सिंग लोड के तहत वर्म और व्हील के बीच सूक्ष्म घूर्णी गति) और संभवतः दक्षता (सतह की खुरदरापन और स्नेहक की स्थिति में बदलाव के कारण) है। यह अनुपात स्वयं ज्यामितीय है और जब तक दांत और थ्रेड मौजूद हैं, तब तक अपरिवर्तनीय है।
प्रश्न: ये सूत्र-आधारित दक्षता पूर्वानुमान कितने सटीक हैं?
प्रारंभिक आकार निर्धारण के लिए, यदि आप एक यथार्थवादी घर्षण कोण चुनते हैं, तो सूत्र के अनुमान ±5 प्रतिशत अंकों की सटीकता के साथ सटीक होते हैं। महत्वपूर्ण अनुप्रयोगों के लिए अंतिम मोटर चयन हेतु, आपूर्तिकर्ता से बेंच-परीक्षण डेटा का अनुरोध करें - हमारे सहित अधिकांश प्रतिष्ठित निर्माता विभिन्न भार और गति बिंदुओं पर मापी गई दक्षता वक्र प्रदान कर सकते हैं। प्रारंभिक डिज़ाइन के लिए सूत्र सही उपकरण है; अंतिम निर्णय के लिए बेंच डेटा सही उपकरण है।
वर्म मोटर और वर्म व्हील के जोड़े का गणित सीधा-सादा है, लेकिन इसमें गलतियों की गुंजाइश नहीं है। अगर आप अनुपात का मूल सूत्र ही गलत लिख दें, तो सारी गणितीय गड़बड़ी तुरंत सामने आ जाती है। अगर दक्षता की गणना गलत हो जाए, तो ड्राइव खराब हो जाती है, इंजन ज़्यादा गर्म हो जाता है, वारंटी खत्म हो जाती है, और यह गलती महीनों तक छिपी रहती है, जब तक कि फील्ड से वापस आने वाले उत्पाद आने शुरू नहीं हो जाते। इस लेख की शुरुआत में दिए गए दो सूत्र लगभग सारा काम संभाल लेते हैं — बस इन्हें वास्तविक परिचालन बिंदु पर, घर्षण के यथार्थवादी अनुमानों के साथ लागू करना होता है, और दांतों की संख्या को पूर्णांक में बदलना होता है, जिसे कारखाना वास्तव में बना सकता है।
कोरियाई और जापानी OEM डिज़ाइन टीमों के लिए, जो मोटर और अनुपात विनिर्देशों को अंतिम रूप देने से पहले गणना की समीक्षा करवाना चाहते हैं, हमारा इंजीनियरिंग डेस्क एक समीक्षा प्रक्रिया चलाता है। वर्म गियर अनुपात गणना समीक्षा आपके कार्य चक्र के आधार पर, यह वास्तविक परिचालन बिंदु पर यथार्थवादी दक्षता लागू करता है, और एक ऐसे दांत जोड़े की अनुशंसा करता है जिसे कारखाना मानक कैटलॉग लीड टाइम के भीतर वितरित कर सकता है। 5:1 से 100:1 तक के मानक कैटलॉग अनुपात हमारे सभी भंडारों में उपलब्ध हैं। सिंगल-स्टार्ट और मल्टी-स्टार्ट वर्म गियर सेट मॉड्यूल M1 से M8 तक के लिए, और कैटलॉग रेंज से बाहर के कस्टम अनुपात ड्राइंग के आधार पर ऑर्डर पर बनाए जाते हैं।
क्या आपको अपने अनुपात और मोटर के आकार की सही जांच की आवश्यकता है?
अपना आउटपुट टॉर्क, आउटपुट आरपीएम और ड्यूटी साइकिल भेजें। हम पूरी गणना करेंगे, एक पूर्णांक दांत युग्म की सिफारिश करेंगे और आपको बताएंगे कि गणितीय गणना के अनुसार वास्तव में कितनी मोटर शक्ति की आवश्यकता है - आमतौर पर एक कोरियाई कार्य दिवस के भीतर।
संपादक: सीएक्सएम


























