Wie Schneckengetriebe funktionieren – Die Mechanik in 5 Schritten
Eine Schritt-für-Schritt-Analyse dessen, was tatsächlich an der Zahnkontaktfläche passiert – die Physik, die darüber entscheidet, ob Ihr Antrieb kühl und leise läuft oder ob die Bronze in drei Monaten verbraucht ist.
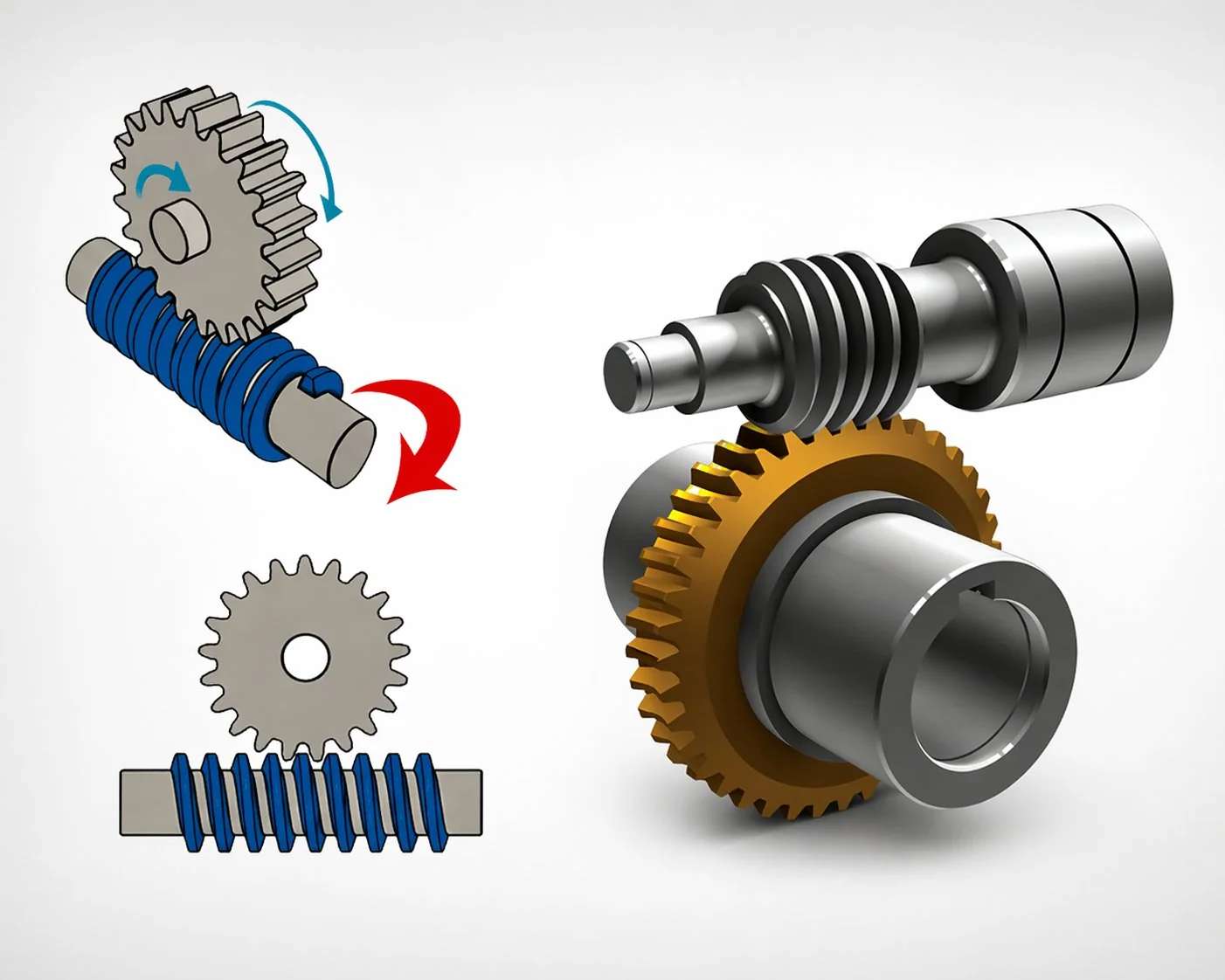
Der Mechanismus lässt sich in fünf Schritten zusammenfassen: Eine Antriebswelle treibt die Schnecke an, deren spiralförmiges Gewinde seitlich gegen einen Zahn des Schneckenrades drückt. Der Kontakt gleitet statt zu rollen (dies ist der entscheidende physikalische Vorgang). Das Drehmoment wird proportional zum Untersetzungsverhältnis abzüglich der Reibungsverluste verstärkt. Bei kleinen Steigungswinkeln blockiert die Geometrie selbst, sodass das Rad die Schnecke nicht rückwärts antreiben kann. Alle weiteren Eigenschaften eines Schnecken-Schneckenrad-Gespanns – Wärmeentwicklung, Geräuschentwicklung, Schmierstoffwahl, Lebensdauer – ergeben sich aus diesem Fünf-Schritte-Zyklus.
Warum statische Diagramme die Realität verkennen
Die meisten Erklärungen der Schneckengetriebemechanik basieren auf einer Explosionszeichnung mit Pfeilen, die auf „Eingang“ und „Ausgang“ zeigen. Diese Darstellung ist zwar korrekt, aber für Konstruktionsentscheidungen unbrauchbar. Die Pfeile zeigen weder die 40 Millisekunden Kontaktzeit zwischen einem Zahnradzahn und dem Schneckengewinde, noch die Wanderung der Kontaktfläche von der Vorderflanke zur Hinterflanke, noch warum die Schmierfilmdicke direkt unter dem Kontaktpunkt darüber entscheidet, ob das Getriebe 40.000 oder nur 4.000 Betriebsstunden hat.
Stellen Sie sich im Folgenden einen einzelnen Zahn des Schneckenrades vor – nennen wir ihn Zahn 17 eines 40-zahnigen Rades – und verfolgen Sie dessen vollständigen Eingriffszyklus während der Drehung der Schnecke. Jeder der fünf untenstehenden Abschnitte stellt eine einzelne Phase dieses Zyklus dar. Verinnerlichen Sie dieses Bild, und der Rest der Schneckengetriebekonstruktion – Materialauswahl, Schmierung, Genauigkeitsklasse, Bestimmung des Steigungswinkels – ergibt sich fast von selbst.
Schritt 1 – Das Eingangsdrehmoment trifft auf die Schneckenwelle.
Ein Motor, eine Handkurbel oder ein vorgeschaltetes Zahnrad treibt die Schneckenwelle an. Industriemotoren arbeiten typischerweise mit Drehzahlen zwischen 500 und 3.000 U/min; servogesteuerte Präzisionsanwendungen können mit niedrigeren Drehzahlen betrieben werden; Hochgeschwindigkeits-Direktantriebe erreichen gelegentlich 5.000 U/min. Das an der Welle anliegende Drehmoment entspricht der Motorleistung – oft nur wenige Newtonmeter bei einem Antrieb mit geringer Leistung.
Zwei Merkmale der Eingangswelle sind für alle nachfolgenden Komponenten entscheidend. Erstens handelt es sich bei der Schnecke selbst um ein präzisionsgeschliffenes Spiralgewinde, nicht um einen gefrästen Zahn. Eine Oberflächenrauheit Ra unter 0,4 Mikrometern ist bei hochwertigen Bauteilen Standard, da jede Unebenheit im Mikrometerbereich die Reibung während des Gleitkontakts erhöht. Zweitens muss die Welle eine erhebliche axiale Schubkraft aufnehmen (die Gründe dafür werden in Schritt 3 erläutert). Daher ist die Lagerung der Eingangswelle nicht so einfach wie bei einem Stirnradantrieb.
Schritt 2 – Das Gewinde greift in Zahn 17 ein
Während sich die Schnecke dreht, nähert sich die Vorderkante einer Windung seitlich dem Zahn 17. Der Eingriff beginnt am unteren Ende des Schneckengangs (der konkaven Fläche des Schneckenrads, die die Schnecke umschließt) und schreitet entlang der Zahnflanke zur Spitze fort. Bei einem eingängigen Schneckenrad mit einem einzigen Schneckengang befinden sich zu jedem Zeitpunkt drei bis vier Zähne im Eingriff: Zahn 16 läuft gerade aus, Zahn 17 hat den maximalen Eingriff, Zahn 18 tritt gerade ein und Zahn 19 nähert sich.
Bei einer eingängigen Schnecke, die mit 1500 U/min rotiert, greift jeder einzelne Zahn eines 40-Zahn-Rades einmal pro Schneckenumdrehung – also alle 40 Millisekunden. Die tatsächliche Kontaktdauer beträgt etwa 12 bis 15 Millisekunden pro Zyklus. Während dieser 12 Millisekunden gleitet das Schneckengewinde über die gesamte nutzbare Zahnflanke von der Zahnwurzel bis zur Zahnspitze, nicht nur über den kurzen tangentialen Kontakt, wie er bei einem Stirnradpaar auftritt.
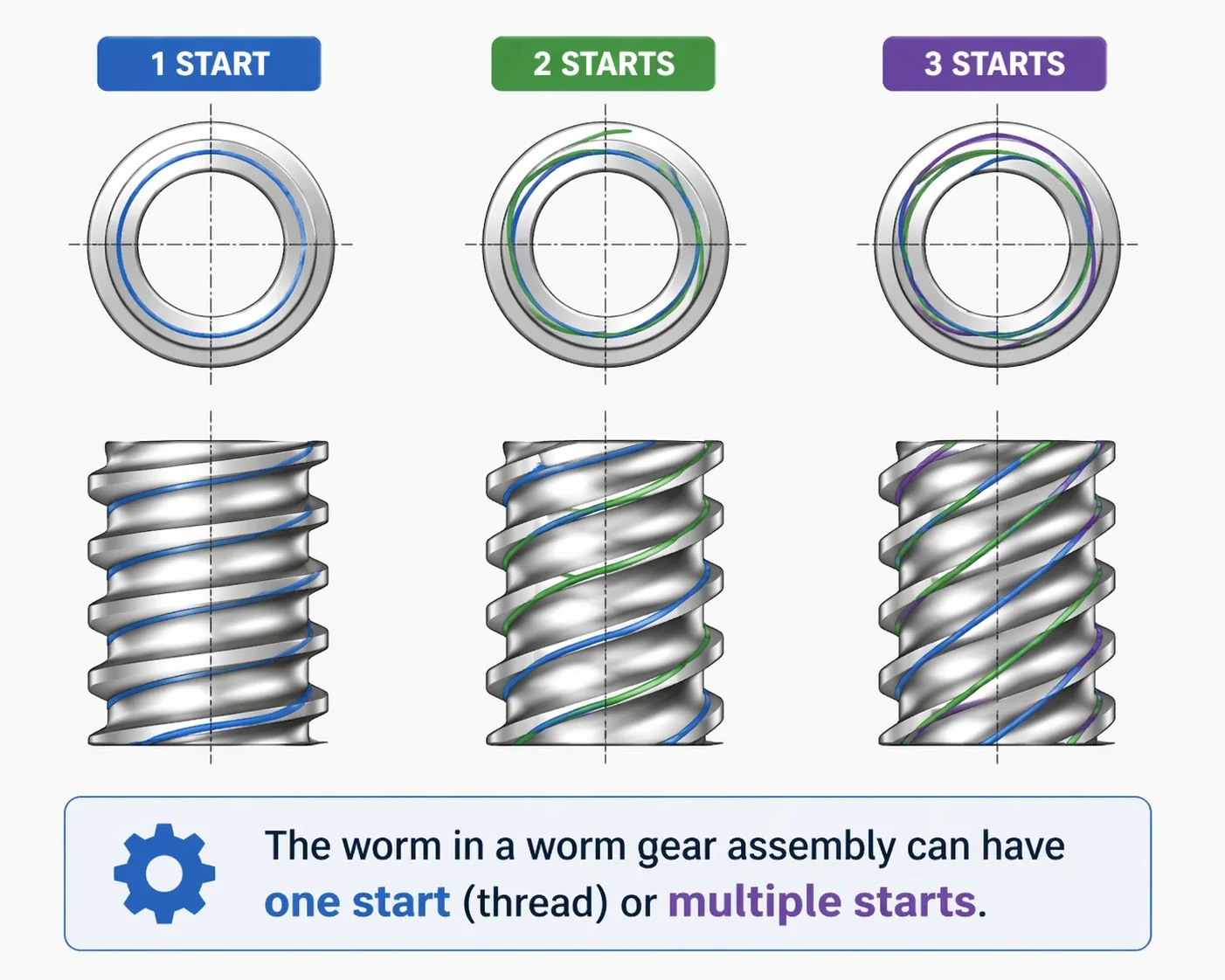
Bei einer zweigängigen Schnecke (Zweigang-Helix) verschiebt jede Umdrehung das Rad um zwei Zähne anstatt um einen. Zahn 17 hat weiterhin das gleiche Eingriffsfenster von 12 bis 15 Millisekunden, aber der Zyklus wiederholt sich zweimal pro Schneckenumdrehung. Mehrgängige Schneckengetriebe sind genau dafür da, ein optimales Verhältnis zwischen Eingriffsweg und Effizienz zu erzielen – mehr Gänge bedeuten einen größeren Vorschubwinkel, eine kürzere Gleitstrecke pro Eingriff und weniger Wärmeentwicklung.
Schritt 3 – Gleitender Kontakt überträgt Kraft
Hier ist die physikalische Tatsache, die alles andere an einem Schnecken- und Schneckenradsystem definiert: Wenn das Schneckengewinde an Zahn 17 anliegt, ist der Kontakt überwiegend gleitend – das spiralförmige Gewinde der Schnecke schabt seitlich über die Zahnflanke und überträgt die Kraft tangential. Es gibt praktisch keine Rollkomponente. Dies unterscheidet sich grundlegend von einem Stirn- oder Schrägverzahnungsgetriebe, bei dem das Rollen dominiert und das Gleiten eine geringe Nebenbewegung nahe der Wälzlinie darstellt.
Wenn mir ein Kunde eine Frage stellt und ich ihm eine Antwort geben muss, die ihn vor 80 Prozent der in zwei Jahrzehnten beobachteten Ausfallursachen schützt, lautet diese: „Denken Sie daran, dass es sich um Gleit- und nicht um Rollkontakt handelt, und wählen Sie Ihr Schmiermittel entsprechend.“ Herkömmliches Stirnradgetriebeöl zerstört ein Schneckenrad aus Bronze innerhalb weniger Wochen. Das Schmiermittel muss einen Schmierfilm bilden, der nicht durch den gesamten Gleitvorgang abgetragen werden kann. Dies ist hydrodynamisch deutlich komplexer als ein kurzzeitiger Rollkontakt. ISO VG 460 oder 680 mit für Buntmetalle geeigneten Additiven ist die sichere Standardlösung. Unter 70 °C Ölsumpftemperatur können Sie bei Mineralöl bleiben, darüber sollten Sie auf PAO- oder PAG-Synthetiköl umsteigen.
Drei Kraftkomponenten an jedem Kontakt
Beim Gleitkontakt wirken drei Kraftkomponenten auf den Zahnradzahn und drei gleich große, entgegengesetzt gerichtete Komponenten auf das Schneckengewinde. Deren Verständnis ist die Grundlage für die Lagerauswahl und die Wellenkonstruktion.
Die Axialkraft auf die Schneckenwelle ist es, die unerfahrene Konstrukteure oft überrascht. Bei einem 40:1-Getriebe mit einer Kraftübertragung von 50 Nm am Rad kann der Axialschub auf die Schneckenwelle leicht 800 N überschreiten. Eine einfache Rillenkugellageranordnung, die für ein Stirnradgetriebe völlig ausreichend wäre, würde sich in einem Schneckengetriebe innerhalb eines Jahres auflösen. Kegelrollenlager oder gegenläufig angeordnete Schrägkugellagerpaare sind die Standardlösung.
Schritt 4 – Das Drehmoment wird am Radausgang verstärkt.
Sobald die Tangentialkraftkomponente Zahn 17 erreicht, wird sie über den Hebelarm des Radradius in ein Drehmoment an der Abtriebswelle umgewandelt. Die Berechnung ist einfach: Eine eingängige Schnecke, die in ein 40-zahniges Rad eingreift, dreht dieses pro Schneckenumdrehung um genau 1/40 einer Umdrehung. Die Eingangsdrehzahl wird durch 40 geteilt, das Eingangsdrehmoment mit 40 multipliziert – abzüglich der Reibungsverluste.
Reibungsverluste sind der Knackpunkt. Gleitreibung führt zu einem erheblichen Verlust an zugeführter Leistung in Form von Wärme. Ein einstufiger Antrieb mit einem Steigungswinkel von 4 Grad und geeignetem Schmierstoff erreicht einen Wirkungsgrad von etwa 60 bis 65 Prozent. Ein vierstufiger Antrieb mit einem Steigungswinkel von 16 Grad steigert diesen auf 88 bis 92 Prozent – allerdings auf Kosten eines um den Faktor vier reduzierten Übersetzungsverhältnisses. Der Zusammenhang ist geometrisch: Maximales Übersetzungsverhältnis und maximaler Wirkungsgrad schließen sich gegenseitig aus.

Die Effizienzformel, mit der jeder Konstrukteur irgendwann konfrontiert wird, lautet η = tan(λ) / tan(λ + φ), wobei λ der Steigungswinkel der Schnecke und φ der Reibungswinkel des Kontakts ist (typischerweise 5 bis 8 Grad bei gut geschmiertem Stahl auf Bronze, 10 bis 15 Grad bei schlechter Schmierung oder Trockenlauf-Notfällen).
Setzt man die Werte ein, wird der Kompromiss deutlich. Bei λ = 4 Grad und φ = 6 Grad beträgt der Wirkungsgrad etwa 40 Prozent. Bei λ = 12 Grad, also gleichem Reibungswinkel, steigt der Wirkungsgrad auf 67 Prozent. Bei λ = 25 Grad erreicht er 80 Prozent. Eine detailliertere Erläuterung mit Beispielrechnungen finden Sie in unserem Begleitartikel zum Thema Schneckengetriebeübersetzung und deren Berechnung.
Schritt 5 – Die Selbstverriegelung hält die Position, wenn die Eingabe stoppt

Die Schnecke hat ihre Umdrehung abgeschlossen, der Antriebsmotor stoppt, und Zahn 17 wird nicht mehr angetrieben. Was dann geschieht und was Schneckengetriebe grundlegend von anderen Getriebearten unterscheidet: nichts. Das Rad rollt nicht zurück, die Last rutscht nicht nach unten, der Antrieb hält einfach.
Selbsthemmung tritt ein, wenn der Steigungswinkel der Schnecke unter etwa 5 bis 6 Grad liegt. Bei diesen geringen Winkeln übersteigt die Haftreibung am Zahneingriff die Kraft, die das belastete Rad auf die Schnecke ausüben kann, um sie seitlich zu verschieben. Der Antrieb kann geometrisch nicht rückwärts angetrieben werden. Diese Eigenschaft macht Schnecken- und Schneckenradpaare zum Einsatz in Aufzügen, Ventilantrieben, Hebezeugen, Antennenpositionierern und Feststellbremsen – überall dort, wo ein unbeabsichtigter Rücklauf gefährlich oder kostspielig wäre.
Einige wichtige Hinweise: Die Selbsthemmung ist geometrisch, nicht absolut. Vibrationen können eine Last zum Umkippen bringen. Der Schmierfilm verändert den Reibungskoeffizienten – ein Antrieb, der im kalten Zustand selbsthemmend wirkt, kann im warmen Zustand langsam an Kraft verlieren. Ab einem Anstellwinkel von 12 Grad (typisch für Mehrfachanlaufantriebe) ist die Selbsthemmung vollständig aufgehoben, und das Rad kann sich frei rückwärts drehen. Verwenden Sie die Selbsthemmung niemals als primäre Sicherheitsvorrichtung bei fallenden Lasten; spezifizieren Sie eine separate mechanische Bremse und betrachten Sie die Selbsthemmung als sinnvolle Zusatzfunktion.
Ein ausgearbeitetes Beispiel, das Sie auf einer Serviette nachzeichnen können.
Nehmen wir als typische industrielle Anwendung einen elektrischen Kettenzug, der eine 200 kg schwere Last auf einer Trommel mit 50 mm Radius hebt. Die Berechnung erfolgt direkt anhand der fünf oben genannten Schritte.
Ein 0,75-kW-Motor mit einer Eingangsdrehzahl von 1400 U/min erzeugt eine Hubtrommeldrehzahl von 35 U/min und ein Drehmoment von 98 Nm. Dadurch wird die 200 kg schwere Last sicher angehoben, während die Selbsthemmung sie in der Luft hält, sobald der Bediener die Steuerung loslässt. Beachten Sie, wie jeder Wert in dieser Kette von der korrekten Wirkungsgradberechnung abhängt – und der Wirkungsgrad wiederum vom Anstellwinkel, der vom gewählten Übersetzungsverhältnis abhängt. Die fünf Schritte des Zyklus sind miteinander verbunden; die Anpassung eines Parameters beeinflusst nicht die anderen.
Was Designer am häufigsten falsch machen
Effizienz wird als Konstante betrachtet. Der im Datenblatt angegebene Wirkungsgrad von 60 % bezieht sich auf den Nennwert bei Nennlast und Nenndrehzahl. Betreibt man denselben Antrieb mit nur einem Zehntel der Last, sinkt der Wirkungsgrad oft unter 40 %, da der Schmierfilm dicker als nötig ist und das Reibungsmoment das reduzierte Nutzdrehmoment dominiert. Verwenden Sie daher immer den tatsächlichen Betriebspunkt, nicht den angegebenen Wirkungsgrad.
Dimensionierung des Eingangsmotors ohne Reibung in der Kette. Man ist versucht, das Ausgangsdrehmoment durch das Übersetzungsverhältnis zu teilen und es als Motordrehmoment zu bezeichnen. Diese Berechnung liefert jedoch ein falsches Ergebnis, da sie die Reibung außer Acht lässt. Der Wirkungsgrad muss immer berücksichtigt werden: Eingangsdrehmoment = Ausgangsdrehmoment ÷ (Übersetzungsverhältnis × Wirkungsgrad).
Die axiale Schubkraft auf die Eingangswelle wird außer Acht gelassen. Eine rein radiale Lageranordnung ist die häufigste Ursache für mechanische Ausfälle bei Nachrüstungen, bei denen ein Stirnradgetriebe durch ein Schneckengetriebe ersetzt und die Originallager beibehalten wurden. Die axiale Belastung führt zu einem vorzeitigen Verschleiß dieser Lager.
Unter der Annahme, dass die Selbstverriegelung dauerhaft ist. Die Selbsthemmung hängt von einem Reibungskoeffizienten ab, der sich mit Temperatur, Schmierstoffzustand und Vibrationen ändert. Ein Antrieb, der direkt nach dem Kauf selbsthemmend wirkt, kann nach einem Jahr, wenn das Öl durch Hitze dünnflüssiger geworden und durch den Gebrauch gealtert ist, eine verminderte Selbsthemmung aufweisen. Verwenden Sie für sicherheitskritische Anwendungen eine Bremse.
Verwendung eines handelsüblichen Schmiermittels. Schneckengetriebeöl ist ein Spezialprodukt. Der Gleitkontakt erfordert einen dickeren Schmierfilm als der Wälzkontakt, und die Verträglichkeit mit Buntmetallen ist zwingend erforderlich, da die meisten Schneckenräder aus Bronze bestehen. Aktive Schwefel-EP-Additive, die üblicherweise in Differentialölen enthalten sind, korrodieren die Bronzeflanke oberhalb von 70 °C. Verwenden Sie daher immer ein für diese Anwendung geeignetes Öl – und wenn Sie sich nicht sicher sind, welche Viskositätsklasse für Ihren Betriebszustand geeignet ist, fragen Sie nach einem Öl. Überprüfung der Schmierstoffspezifikation vom Ingenieursschreibtisch vor der ersten Ölbefüllung.
Häufig gestellte Fragen
F: Warum benötigt ein Schneckengetriebe ein Axiallager an der Eingangswelle?
Der Gleitkontakt zwischen Schneckengewinde und Radzahn erzeugt eine axiale Kraftkomponente entlang der Schneckenwelle. Bei einem typischen Industrieantrieb kann diese axiale Schubkraft je nach Drehmoment und Steigungswinkel zwischen einigen hundert und mehreren tausend Newton liegen. Ein einfaches Radialkugellager kann diese Last nicht dauerhaft aufnehmen, ohne auszufallen. Daher werden bei Schneckenwellen standardmäßig Kegelrollenlager oder Schrägkugellagerpaare eingesetzt.
F: Kann ein Schneckengetriebe trocken laufen, auch nur kurzzeitig?
Keinesfalls. Der Gleitkontakt benötigt einen kontinuierlichen Schmierfilm, um Metallabrieb zu verhindern. Bereits nach wenigen Sekunden Trockenlauf steigt der Reibungswinkel von den üblichen 6 bis 8 Grad auf 15 Grad oder mehr, der Wirkungsgrad des Antriebs bricht ein, das Bronzerad verschleißt und die Oberflächentemperatur schießt in die Höhe. Antriebe, die im Betrieb Öl verlieren, sind oft irreparabel – die Radzähne müssen ersetzt werden, selbst wenn die Schneckenwelle intakt bleibt.
F: Warum ist die Schnecke immer der Antrieb und nie das angetriebene Element?
Bei selbsthemmenden Anordnungen (Anstellwinkel unter 5 bis 6 Grad) kann das Rad die Schnecke nicht antreiben, da die Haftreibung am Kontaktpunkt die Rücktriebskraft übersteigt. Bei nicht selbsthemmenden Anordnungen (Mehrganggetriebe, größerer Anstellwinkel) kann das Rad die Schnecke zwar antreiben, das System arbeitet in dieser Richtung jedoch deutlich weniger effizient, da die Reibung sowohl vorwärts als auch rückwärts der Bewegung entgegenwirkt. Die natürliche Energierichtung der Geometrie ist die Ansteuerung des Rades durch die Schnecke.
F: Wie viel Wärme erzeugt ein Schneckengetriebe tatsächlich?
Es hängt vollständig vom Betriebspunkt ab. Ein Antrieb mit 1 kW Eingangsleistung und 60 % Wirkungsgrad gibt 400 W Wärme im Ölsumpf ab. Bei einem kleinen, geschlossenen Gusseisengehäuse reicht dies aus, um die Sumpftemperatur im stationären Betrieb um 30 bis 50 Grad Celsius über die Umgebungstemperatur zu erhöhen. Bei Antrieben mit einer Dauerleistung von über 5 kW ist eine zusätzliche Kühlung (Kühlrippen, Lüfter oder Ölkühler) zwingend erforderlich. Die Wärmeabfuhr ist oft der limitierende Faktor für den Dauerbetrieb. Schneckengetriebe Dimensionierung – nicht Drehmoment, nicht Lagerlebensdauer, sondern wie schnell das Gehäuse Abwärme an die Umgebung abgeben kann.
F: Ändert sich das Übersetzungsverhältnis des Schneckengetriebes, wenn ich das Material der Schnecke ändere?
Nein, das Verhältnis ist rein geometrisch – die Anzahl der Zähne des Schneckenrades geteilt durch die Anzahl der Schneckengänge. Das Material beeinflusst Belastbarkeit, Lebensdauer und Wirkungsgrad, nicht aber die kinematische Beziehung zwischen Eingangs- und Ausgangsdrehzahl. Ein 40:1-Getriebe behält sein Verhältnis von 40:1 bei, egal ob die Schnecke aus gehärtetem SCM415-Legierungsstahl oder ungehärtetem Baustahl besteht; lediglich das Bronzerad weist in beiden Fällen einen unterschiedlichen Verschleiß auf.
F: Welcher Drehzahlbereich ist für einen Schneckenwellenantrieb sinnvoll?
Für Industrieantriebe liegt der optimale Betriebsbereich bei 500 bis 3.000 U/min. Unterhalb von 500 U/min bildet sich aufgrund der zu geringen Gleitgeschwindigkeit kein Schmierfilm, sodass hydrodynamische Effekte nicht ausreichend wirken. Oberhalb von 3.000 U/min übersteigt die Wärmeentwicklung die Kühlleistung eines typischen geschlossenen Gehäuses, weshalb eine Kühlung erforderlich wird. Spezielle Hochgeschwindigkeitsantriebe mit Zwangsumlaufschmierung erreichen Drehzahlen von bis zu 5.000 oder 6.000 U/min, stellen aber eher die Ausnahme als die Regel dar.
F: Warum fühlt sich ein Schneckengetriebe anders an als ein Stirnradgetriebe, wenn man es von Hand dreht?
Der größte Teil des Widerstands, den Sie spüren, ist Gleitreibung, nicht nur Trägheit. Ein Stirnrad dreht sich nach dem Anlaufen relativ leicht, da der Wälzkontakt reibungsarm ist. Ein Schneckengetriebe mit Schneckenrad fühlt sich schwer und gedämpft an, fast so, als ob es eine viskose Reibung hätte, da bei jeder Umdrehung das Schneckengewinde über mehrere Zahnflächen des Schneckenrads gleitet. Der Handdrehtest ist eine nützliche erste Überprüfung, ob das Schmiermittel geeignet ist – ist es zu dickflüssig, fühlt sich der Antrieb schwergängig an, ist es zu dünnflüssig, sind leise mechanische Geräusche durch das Gehäuse hörbar.
Sobald das Fünf-Schritte-Modell klar ist, lassen sich alle weiteren technischen Entscheidungen bezüglich Schnecke und Schneckenrad direkt darauf abstimmen. Bei der Materialauswahl geht es darum, welche zwei Metalle die Gleitphase überstehen. Die Schmierung dient dazu, den Schmierfilm während des gesamten Kontaktvorgangs aufrechtzuerhalten. Der Steigungswinkel stellt das optimale Verhältnis zwischen Übersetzungsverhältnis und Wirkungsgradverlust dar. Selbsthemmung tritt ein, wenn der Reibungswinkel den Steigungswinkel überschreitet. Die Wärmeabfuhr begrenzt die Anzahl der möglichen Zyklen.
Für koreanische und japanische OEM-Entwicklungsteams, die ihre erste Schneckengetriebespezifikation erstellen, kann unser Entwicklungsbüro in Ansan Ihren Betriebszyklus prüfen, einen passenden Steigungswinkel und ein geeignetes Materialpaar empfehlen und Ihnen ein Angebot unterbreiten. ein- und mehrgängige Schneckengetriebe in unserem Standardkatalog. Zeichnungen werden unter Geheimhaltungsvereinbarung geprüft, bevor ein Angebot unser Haus verlässt.
Sie hängen bei der Frage nach dem optimalen Vorhaltewinkel und der passenden Effizienz fest?
Senden Sie uns Ihr gewünschtes Drehmoment, Ihre Eingangsdrehzahl und die Information, ob Sie eine Selbsthemmung benötigen. Unsere Ingenieure führen die fünfstufige Berechnung für Sie durch, empfehlen Ihnen ein Übersetzungsverhältnis und einen Steigungswinkel und erstellen Ihnen ein Angebot für das passende Schneckenradpaar – in der Regel innerhalb eines koreanischen Werktages.
Herausgeber: Cxm


























