Módulo de engranaje helicoidal: cómo elegir el tamaño de diente adecuado para el par motor.
¿Qué módulo necesito para una salida de 500 N·m? El módulo es el elemento clave para el dimensionamiento de cada par de engranajes helicoidales, y la respuesta se obtiene mediante un cálculo inverso riguroso que, si se realiza correctamente, lleva unos 10 minutos.
El módulo del engranaje helicoidal (m) es el parámetro básico del tamaño del diente, medido en milímetros, y se define como m = paso / π = d₁ / q (diámetro primitivo del tornillo sin fin dividido por el cociente de diámetros). Los módulos estándar según la norma ISO 54 son 1, 1,5, 2, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20 y 25 mm, y los valores de 1 a 8 cubren aproximadamente el 90 por ciento de la demanda industrial de engranajes helicoidales. La elección del módulo se calcula a partir del par de salida de la aplicación: los módulos pequeños (1 a 2) soportan de 1 a 50 N·m, los módulos medianos (2,5 a 4) soportan de 50 a 800 N·m, los módulos grandes (5 a 8) soportan de 800 a 5000 N·m, y los módulos muy grandes (10+) soportan más de 5000 N·m. La elección del módulo del engranaje helicoidal está ligada a la distancia entre centros y a la relación mediante la fórmula a = m(q + z₂)/2; si se modifica una de ellas, las otras dos deben ajustarse. El error de adquisición más común consiste en especificar un módulo no estándar (por ejemplo, m=3,5) cuando los módulos estándar m=3 o m=4 serían adecuados; esta corrección permite ahorrar entre un 60 y un 80 por ciento en costes de utillaje.
Qué es un módulo de engranaje helicoidal y por qué es importante.
El módulo (m) es el parámetro métrico básico del tamaño del diente para el engranaje helicoidal, medido en milímetros. La definición más simple es geométrica: el módulo es igual al paso axial dividido por pi, o m = pₐ / π. Un par de engranajes helicoidales con un paso axial de 12,566 mm tiene un módulo de 4. La relación es la misma que para los engranajes rectos y helicoidales, donde el módulo define la distancia lineal entre dientes adyacentes en milímetros del círculo primitivo.
El módulo es el ADN de dimensionamiento de todo el par de engranajes helicoidales. A partir del módulo se obtienen el diámetro primitivo del tornillo sin fin (d₁ = m × q), el diámetro primitivo de la rueda (d₂ = m × z₂), la distancia entre centros (a = m × (q + z₂) / 2), la altura del diente (h = 2,25 × m), la longitud de la línea de contacto, la fuerza tangencial máxima admisible y los cálculos de capacidad de carga según DIN 3996 e ISO 14521. Si el módulo es correcto, el resto del diseño se deriva de forma coherente. Si es incorrecto, cada cálculo posterior propaga el error.
Para los equipos de diseño de fabricantes de equipos originales (OEM) coreanos y japoneses, la elección del módulo de engranaje helicoidal es el primer parámetro que se define tras determinar el par de aplicación y el rango de carga disponible. Pequeños errores en la selección del módulo pueden derivar en carcasas sobredimensionadas, ruedas de tamaño insuficiente o una capacidad de carga marginal, lo que se traduce en un desgaste acelerado a los 18 o 24 meses de servicio.
Módulos estándar ISO 54 y lo que contiene cada uno.
La norma ISO 54 (y su equivalente DIN 780) define los valores preferidos y secundarios del módulo del engranaje helicoidal. Los módulos preferidos son 1, 1,25, 1,5, 2, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20 y 25 mm. Existen módulos secundarios (1,125, 1,375, 1,75, 2,25, 2,75, 3,5, 4,5, 5,5, 7, 9, 11, 14, 18 y 22 mm), pero rara vez se encuentran en stock.
Cada módulo corresponde a un rango de aplicación específico según el par de salida. La tabla a continuación relaciona cada módulo con la distancia entre centros, el par de salida y la clase de aplicación típicos; una herramienta práctica para realizar cálculos inversos.
Los valores de par del engranaje helicoidal son típicos para una rueda de bronce fosforoso contra un tornillo sin fin de acero cementado con un valor q estándar de 8-10, una relación de 30:1 a 50:1, un perfil de diente ZN o ZI y un ciclo de trabajo normal. Se producen variaciones de ±30 a 40 por ciento con mejoras en el material, la clase de precisión y la elección del lubricante. Utilice la tabla para la selección inicial del módulo; ajuste el cálculo de resistencia según DIN 3996 para la especificación final.
Módulo de cálculo inverso a partir del par de la aplicación
El problema práctico del diseño de engranajes helicoidales es inverso al de los problemas teóricos: el ingeniero conoce el par de salida y la relación de transmisión de la aplicación, y necesita encontrar el módulo que proporcione ese par con un coste y un margen de tolerancia aceptables. Tres pasos hacen que el cálculo inverso sea manejable.
Paso 1: Aplicar el factor de servicio al par de diseño. Multiplique el par de salida constante calculado por el factor de servicio (normalmente de 1,25 a 2,0, según el ciclo de trabajo y la clase de carga de choque). Una carga constante de 500 N·m con un factor de servicio de 1,5 produce un par de diseño de 750 N·m.
Paso 2: Consulta la tabla para encontrar el módulo correspondiente. El par de diseño de 750 N·m se encuentra dentro del rango m=4,0 (400-800 N·m); la columna de la tabla proporciona la respuesta directamente. La distancia entre centros correspondiente es de aproximadamente 100 mm.
Paso 3: Verifique la compatibilidad de la distancia entre centros y la relación de aspecto. Compruebe que a = m × (q + z₂) / 2 produce una distancia entre centros razonable con un valor q adecuado. Para m=4, objetivo a=100 mm, relación 50:1 (z₂=50): q = 2(100)/4 − 50 = 0. Inviable: q debe ser positivo e idealmente de 8 a 12. La solución es aumentar la distancia entre centros a 125 mm (m=4 sigue funcionando, q = 2(125)/4 − 50 = 12,5, factible) o aceptar una relación menor con una distancia entre centros de 100 mm.
El proceso de tres pasos lleva entre 10 y 15 minutos por diseño y evita los errores más comunes en la especificación de módulos. Omitir la verificación de la compatibilidad de la distancia entre centros produce diseños que parecen correctos sobre el papel, pero que no se pueden fabricar en el módulo elegido.
Un fabricante japonés de maquinaria textil presentó una especificación de engranaje helicoidal de módulo 2.5 para una aplicación que calculaba un par de salida de 175 N·m con un factor de servicio de 1.4. La elección se situó en el límite superior del rango de capacidad de m=2.5 (100-200 N·m). La revisión de ingeniería de calidad propuso pasar al módulo 3.0, un aumento del 20 % en el tamaño del módulo, un incremento inferior al 8 % en el coste unitario del engranaje helicoidal, pero desplazando el punto de operación del 87 % de la capacidad de m=2.5 al 44 % de la capacidad de m=3.0. La diferencia en la utilización de la capacidad se tradujo en una vida útil esperada aproximadamente un 30 % mayor, ya que la tensión de contacto disminuye con la raíz cuadrada del aumento del módulo. Diferencia de coste anual para la producción de 240 unidades: 4300 USD en piezas. Ahorro anual por intervalos de sustitución prolongados: 18 000 USD en comparación con las sustituciones a mitad de vida útil en la especificación m=2.5. El paso a 0.5 módulos fue prácticamente gratuito después del segundo año. Compruebe siempre si el módulo elegido funciona en el tercio superior de su rango de par motor; de ser así, el siguiente módulo suele ser mejor.
Módulo, q y distancia entre centros: el triángulo de acoplamiento
El módulo de engranaje helicoidal no existe de forma aislada. Está condicionado por la distancia entre centros (a) y el cociente de diámetros (q) mediante la ecuación a = m × (q + z₂) / 2. Tres de las cuatro variables (m, a, q, z₂) suelen estar restringidas por la aplicación; la cuarta debe, por lo tanto, satisfacer la ecuación. La clave reside en identificar cuáles tres variables están restringidas y cuál es libre.
Escenario de restricción 1: envolvente fija. El embalaje de la aplicación determina la distancia entre centros (por ejemplo, a = 100 mm para la carcasa existente). La relación requerida fija z₂ (por ejemplo, 50 dientes para una relación de 50:1 con un tornillo sin fin de una sola entrada). El módulo se restringe entonces para dar un valor q aceptable: m = 2a / (q + z₂). Para un q típico de 10, m = 2(100) / (10 + 50) = 3,33 — no estándar. Los candidatos estándar m=3 (q calculado es 16,67) o m=4 (q calculado es 0, inviable) son los candidatos. Elija m=3 con un q más alto.
Escenario de restricción 2: módulo fijo según el requisito de par. El par de salida de la aplicación determina el módulo (por ejemplo, m = 4,0 para 600 N·m). La relación requerida fija z₂. La distancia entre centros se convierte en el valor derivado: a = m × (q + z₂) / 2. Para m=4, q=10, z₂=50, a = 4(10+50)/2 = 120 mm — estándar no R10. Los valores R10 más cercanos son 100 mm (q=0, inviable) o 125 mm (q=12,5, viable). Elija a = 125 mm con q=12,5.
Escenario de restricción 3: q fijo según la capacidad del proveedor. Algunos proveedores tienen en stock valores q estándar (q = 8, 10, 12 son los más comunes). La relación requerida fija z₂. El módulo y la distancia entre centros deben satisfacer la ecuación conjuntamente. Para q=10 y z₂=50, la relación a = m × 30 significa que m=4 da a=120 mm, m=3 da a=90 mm, m=5 da a=150 mm. Solo m=3 produce un valor cercano a una distancia entre centros estándar (90 mm se encuentra entre R10 80 y 100 — ver nuestra metodología de cálculo de la distancia al centro para resolver esto).
Módulo, paso circular y paso diametral: tres sistemas de medición

A nivel mundial, existen tres sistemas de medición del tamaño de los dientes para la especificación de engranajes helicoidales. El módulo (m, mm) predomina en Europa, Asia y la mayor parte del mundo. El paso circular (CP, pulgadas) se utilizaba históricamente en algunas especificaciones imperiales. El paso diametral (DP, dientes por pulgada) predomina en el uso de la AGMA estadounidense.
La adquisición de engranajes helicoidales de diferentes proveedores requiere una comunicación fluida entre los tres. Los fabricantes de equipos originales (OEM) coreanos y japoneses que prestan servicios a clientes norteamericanos se encuentran habitualmente con los tres en un mismo proyecto.
Módulo para paso circular: CP = π × m. El módulo 2 corresponde a CP = 6,283 mm (o 0,247 pulgadas). El módulo 4 corresponde a CP = 12,566 mm.
Módulo a paso diametral: DP = 25,4 / m. El módulo 2 corresponde a DP = 12,7. El módulo 4 corresponde a DP = 6,35. La conversión es recíproca: un módulo menor da un DP mayor. Los tamaños comunes de engranajes helicoidales estadounidenses son DP 8, 10, 12, que corresponden aproximadamente a módulos 3,18, 2,54, 2,12 (ninguno es un valor de módulo ISO estándar, por lo que los engranajes helicoidales imperiales y métricos no son directamente intercambiables).
Implicación práctica. A engranaje helicoidal La especificación “10 DP” es aproximadamente equivalente al módulo 2.54; no es estándar en el sistema métrico y no existe una coincidencia directa en el catálogo. La sustitución entre sistemas siempre implica ciertas concesiones; la opción más segura es la compatibilidad entre sistemas, tal como se especificó originalmente.
Tres casos reales de selección de módulos de engranajes helicoidales

Los tres casos que se muestran a continuación ilustran tres patrones diferentes de selección de módulos de engranajes helicoidales: elegir el más pequeño de dos módulos adyacentes en el límite superior de capacidad, optar por la suavidad cuando la capacidad es generosa y convertir un módulo no estándar en estándar mediante la modificación de la carcasa.
Cada patrón es la respuesta correcta para su contexto de aplicación; la habilidad en materia de adquisiciones consiste en reconocer qué patrón se aplica.
Caso 1: un fabricante coreano de cintas transportadoras elige el módulo 3.
Un fabricante coreano de transportadores de piezas necesitaba un par de engranajes helicoidales para una nueva línea de producción de transportadores de banda. El par de salida de la aplicación calculado fue de 280 N·m constante, con un factor de servicio de 1,5, lo que da un par de diseño de 420 N·m. La relación requerida es de 40:1 para igualar la velocidad de la banda deseada. La búsqueda en la tabla de módulos ubicó 420 N·m cerca del límite entre m=3 (200-400 N·m) y m=4 (400-800 N·m). La revisión de ingeniería eligió m=3 porque el par de diseño se encontraba en el 105 por ciento de la capacidad de m=3, marginal pero aceptable para el ciclo de trabajo de 16 horas por día, con un ahorro de costos de m=3 frente a m=4 de aproximadamente el 15 por ciento en el par de engranajes helicoidales. La distancia entre centros se calculó en 80 mm para q=10, z₂=40 (a = 3 × 50 / 2 = 75 mm, cerca del estándar R10 de 80 mm con q=13,3). Decisión: m=3, a=80 mm, q=13,3, z₂=40. Vida útil en campo durante 6 años en 180 unidades instaladas: promedio de 5,5 años antes del reemplazo de la rueda de bronce, ligeramente por debajo del objetivo típico de 7 años, pero aceptable para la aplicación de transportador. Lección: elegir el módulo de engranaje helicoidal más pequeño de dos adyacentes en el límite superior de la capacidad es una optimización de costos justificable cuando el ciclo de trabajo es moderado.
Caso 2: Un fabricante japonés de máquinas herramienta selecciona el módulo 2.5 para mayor suavidad.
Un fabricante japonés de indexadores rotativos especificó un par de engranajes helicoidales de alta precisión para una mesa rotativa de 12 estaciones con una repetibilidad de posicionamiento de más o menos 6 segundos de arco. El par de salida de la aplicación era modesto, de 65 N·m pico; tanto el módulo 2.0 como el módulo 2.5 estaban dentro del rango de capacidad. Criterio de selección: suavidad de movimiento. Un módulo más pequeño produce un paso más corto y más dientes engranados por rotación del tornillo sin fin, lo que se traduce en una salida de posición angular más suave. Cálculo: m=2.0 dio un 36 por ciento de utilización de la capacidad, m=2.5 dio un 33 por ciento, m=3.0 dio un 22 por ciento. Tanto m=2 como m=2.5 eran aceptables en cuanto a capacidad. Decisión: m=2.5 para una mejor área de contacto de los dientes y una vida útil más larga, aceptando una suavidad marginalmente menor que la que proporcionaría m=2. Par final: m=2.5, a=63 mm, q=10, z₂=40, relación 40:1, rectificado ZI. La repetibilidad de indexación medida fue de más o menos 4,2 segundos de arco, superando el requisito de 6 segundos de arco. Conclusión: cuando la capacidad es amplia, la elección del módulo se inclina hacia una mayor vida útil; cuando la capacidad es limitada, la elección del módulo se inclina hacia un mayor margen de par.
Caso 3: Un taller de reparación vietnamita evita el módulo 3.5 no estándar.
Un taller de reparación vietnamita recibió una avería en el engranaje helicoidal de una máquina europea importada. Especificación original: módulo 3.5, distancia entre centros 90 mm, relación 31:1. Tanto el módulo como la distancia entre centros eran valores ISO no estándar. Los proveedores de catálogo en Corea, Japón y China devolvieron presupuestos "no estándar, solo a medida" a 1400 USD por par con un plazo de entrega de 8 a 10 semanas. La revisión de ingeniería propuso la conversión al módulo estándar 3 o módulo 4. El módulo 3 desplazaría la distancia entre centros a 90 mm con un valor q calculado de 9, cercano al original pero con una capacidad de par reducida. El módulo 4 desplazaría la distancia entre centros a 100 mm con q=10, requiriendo una modificación menor de la carcasa. Decisión: módulo 4 con una nueva placa de montaje para acomodar el desplazamiento de 10 mm de la distancia entre centros. Par de catálogo estándar a 380 USD por par, plazo de entrega de 1 semana. La modificación de la placa de montaje de la carcasa requirió 2 horas de mecanizado en el taller local. Ahorro total en comparación con la fabricación a medida: 1020 USD por par, más 7 semanas de plazo del proyecto. El cliente volvió a estar operativo 4 semanas antes de lo que hubiera permitido la ruta personalizada. Lección: los módulos no estándar suelen ser consecuencia de diseños heredados y rara vez justifican el sobreprecio de la personalización; la conversión a un módulo estándar con una modificación mínima de la carcasa casi siempre resulta más rentable. reductor de engranajes helicoidales Opciones que adaptan el módulo a los valores estándar ISO 54 para un acceso rápido al catálogo.
Preguntas frecuentes
P: ¿Cuál es la diferencia entre el módulo axial y el módulo normal?
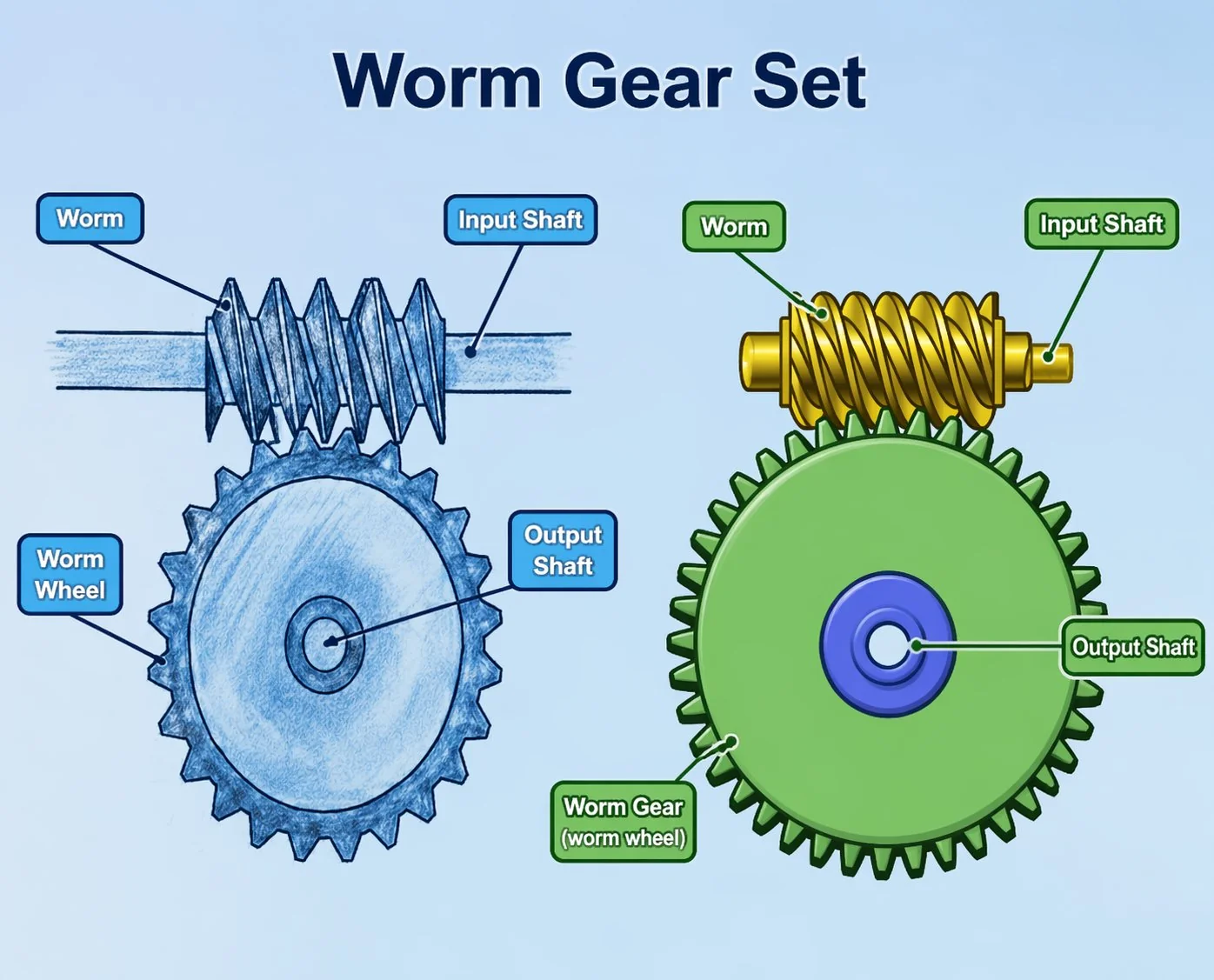
El módulo axial (mₐ o mₓ) es el módulo medido en el plano axial del tornillo sin fin, es decir, el plano que contiene el eje del tornillo sin fin. El módulo normal (mₙ) es el módulo medido perpendicularmente a la hélice de la rosca del tornillo sin fin. Ambos se relacionan mediante la fórmula mₙ = mₐ × cos γ, donde γ es el ángulo de avance del tornillo sin fin. Para tornillos sin fin con ángulos de avance bajos (γ menor de 10 grados), la diferencia entre el módulo axial y el normal es pequeña (normalmente del 1 al 2 %). Para tornillos sin fin con ángulos de avance altos (γ mayor de 20 grados), la diferencia se vuelve significativa. Convención de especificación: los pares de engranajes de tornillo sin fin tipo ZA utilizan el módulo axial por defecto; los tipos ZN, ZI, ZK y ZC utilizan el módulo normal. Siempre verifique la convención que utiliza el proveedor para evitar confusiones durante la revisión del diseño.
P: ¿Puedo usar un módulo no estándar si mi aplicación realmente lo necesita?
Sí, pero con un sobrecoste significativo. Los módulos no estándar requieren un nuevo diseño y utillaje, lo que suele añadir entre 2000 y 6000 USD al coste de la primera unidad y entre 4 y 8 semanas al plazo de entrega. Los módulos personalizados se almacenan en el almacén del proveedor para futuros pedidos, lo que incrementa el coste de inventario. En la práctica, la justificación para un módulo no estándar es poco frecuente: la mayoría de los requisitos que se consideran imprescindibles resultan, tras un análisis, flexibles. Los pocos casos realmente fijos se refieren a piezas de repuesto para equipos antiguos en los que modificar la carcasa es impracticable, o a indexadores de precisión en los que la elección del módulo está ligada a la relación de indexación de una forma que ningún módulo estándar satisface. En estos casos, el sobrecoste está justificado; para todo lo demás, la opción del módulo estándar ahorra mucho tiempo y dinero.
P: ¿Cómo verifico el módulo de un engranaje helicoidal existente?
Tres métodos de medición. Primero, cuente los dientes de la rueda (z₂) y mida el diámetro primitivo de la rueda (d₂) — el módulo es entonces m = d₂ / z₂. El diámetro primitivo es aproximadamente igual al diámetro exterior de la rueda menos 2 × módulo, lo que sirve como autocontrol de consistencia. Segundo, mida el paso axial del tornillo sin fin (pₐ) — distancia entre crestas de rosca adyacentes a lo largo del eje del tornillo sin fin. El módulo es entonces m = pₐ / π. Tercero, utilice un calibre de tamaño de diente de engranaje o una medición de alambre y pasador contra la profundidad de la rosca del tornillo sin fin. El primer método es el más simple y el más fiable. Para una rueda que muestra d₂ = 160 mm y 40 dientes, módulo = 160 / 40 = 4,0. Módulo estándar ISO 54 — confirmado.
P: ¿Por qué el módulo 1.25 es un valor ISO 54 preferido, pero el módulo 1.125 es secundario?
La norma ISO 54 se basa en los números preferidos de Renard (serie R10, paso de 1,25). Los módulos preferidos son: 1, 1,25, 1,5, 2, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20 y 25. Los módulos secundarios se basan en los valores R20 para pasos más precisos. Para la mayoría de las adquisiciones de engranajes helicoidales, el enfoque más adecuado es utilizar únicamente los valores preferidos.
P: ¿La elección de módulos afecta a la eficiencia?
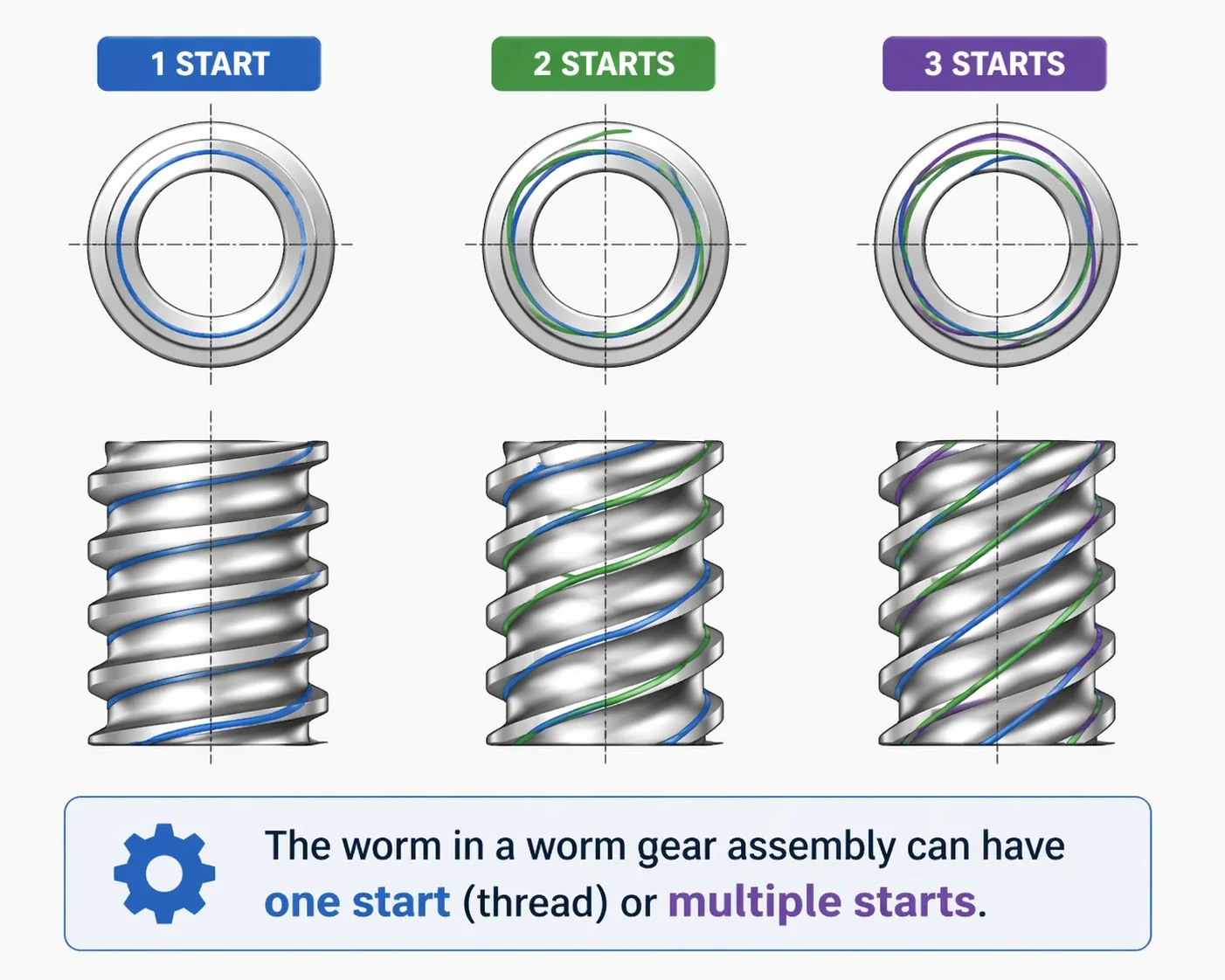
Indirectamente sí: el módulo está ligado al ángulo de avance (γ) mediante la ecuación tan γ = z₁ / q, donde z₁ es el número de pasos del tornillo sin fin y q es el cociente del diámetro. Los módulos más pequeños con el mismo q producen diámetros de paso del tornillo sin fin más pequeños y ángulos de avance ligeramente diferentes según z₁. El ángulo de avance es el principal determinante de la eficiencia: ángulos de avance mayores producen mayor eficiencia. Por lo tanto, la relación entre el módulo y la eficiencia es secundaria, y se produce a través del ángulo de avance. Para fines de diseño práctico, optimice el ángulo de avance directamente (a través de z₁ y q) en lugar de intentar manipular la eficiencia mediante la elección del módulo. La diferencia de eficiencia entre módulos adyacentes con el mismo ángulo de avance suele ser inferior al 2 por ciento.
P: ¿Cuál es el módulo práctico más pequeño para engranajes helicoidales industriales?
Para aplicaciones industriales, el módulo 1.0 es el límite inferior práctico. Por debajo del módulo 1, la producción pasa a utilizar técnicas de instrumentación de precisión, con herramientas, equipos de inspección y proveedores diferentes. Existen pares de engranajes helicoidales de módulo 0.5 y 0.75 para instrumentos de precisión y equipos de laboratorio, pero suelen provenir de proveedores especializados (KHK, SDP-SI) en lugar de catálogos generales de engranajes helicoidales industriales. El par de salida en el módulo 0.5 es de aproximadamente 1-3 N·m. El inventario de catálogos por debajo del módulo 1 es significativamente menor que en el módulo 1 y superiores.
P: ¿Debo especificar siempre el módulo más pequeño que satisfaga el par motor?
No necesariamente. El módulo de engranaje helicoidal más pequeño que cumple con la capacidad ofrece el menor costo y el tamaño más reducido, pero opera con una alta utilización (a menudo entre el 80 y el 100 por ciento de la capacidad nominal). Una alta utilización implica una vida útil más cercana al mínimo de diseño y una mayor sensibilidad a las fluctuaciones de carga. Aumentar el tamaño del módulo generalmente incrementa el costo unitario entre un 8 y un 15 por ciento, pero reduce la utilización del 80-100 por ciento al 40-60 por ciento, lo que se traduce en una vida útil entre un 30 y un 80 por ciento mayor y una mayor tolerancia a las fluctuaciones de carga. El módulo económicamente óptimo suele estar un paso por encima del mínimo, no es el mínimo en sí. La excepción son las aplicaciones con espacio limitado donde el módulo más grande no cabe físicamente; para estos casos, se debe aceptar el módulo mínimo y presupuestar la menor vida útil en el plan de mantenimiento.
El módulo del engranaje helicoidal es el ADN de dimensionamiento del par: al modificarlo, todos los demás parámetros se ven afectados (diámetro primitivo, distancia entre centros, altura del diente, línea de contacto, capacidad de carga). Los 10 módulos estándar, desde m=1,0 hasta m=10,0, cubren aproximadamente el 90 % de la demanda industrial, y la elección correcta para una aplicación determinada se obtiene mediante un cálculo inverso de tres pasos: aplicar el factor de servicio al par, buscar el módulo correspondiente en la tabla y verificar la compatibilidad de la distancia entre centros con q. Omitir el paso de verificación es la causa más común de diseños que parecen correctos en teoría, pero que no son viables en la fabricación. El módulo económicamente óptimo suele estar un paso por encima del mínimo que cumple con la capacidad: el modesto sobrecoste proporciona una vida útil significativamente mayor y una mayor tolerancia a la inevitable variación de carga en condiciones reales.
¿Módulo de cálculo inverso para una nueva aplicación de engranajes helicoidales?
Envíenos el par de salida de la aplicación, la relación, el ciclo de trabajo y las restricciones de envolvente. Realizaremos el cálculo inverso del módulo en tres pasos, recomendaremos el módulo adecuado de la serie preferida ISO 54 y confirmaremos la compatibilidad de la distancia entre centros; normalmente, en un plazo de un día hábil coreano para las especificaciones estándar del catálogo.
Editor: Cxm


























