Módulo de engrenagem sem-fim — Escolhendo o tamanho de dente correto para torque
Qual módulo preciso para uma saída de 500 N·m? O módulo é o DNA de dimensionamento de cada par de engrenagens helicoidais — e a resposta segue um cálculo reverso rigoroso que leva cerca de 10 minutos quando feito corretamente.
O módulo da engrenagem sem-fim (m) é o parâmetro básico do tamanho do dente, medido em milímetros, definido como m = passo / π = d₁ / q (diâmetro primitivo da sem-fim dividido pelo quociente de diâmetros). Os módulos padrão, de acordo com a norma ISO 54, são 1, 1,5, 2, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20 e 25 mm — sendo que os módulos de 1 a 8 atendem a aproximadamente 90% da demanda industrial por engrenagens sem-fim. A escolha do módulo é calculada inversamente à aplicação de torque de saída: módulos pequenos (1 a 2) suportam de 1 a 50 N·m, módulos médios (2,5 a 4) suportam de 50 a 800 N·m, módulos grandes (5 a 8) suportam de 800 a 5.000 N·m e módulos muito grandes (10+) suportam acima de 5.000 N·m. A escolha do módulo da engrenagem sem-fim está diretamente relacionada à distância entre centros e à relação de transmissão por meio da fórmula a = m(q + z₂)/2 — alterar um desses parâmetros exige o ajuste dos outros dois. O erro mais comum na aquisição de ferramentas é especificar um módulo não padrão (por exemplo, m=3,5) quando os módulos padrão m=3 ou m=4 seriam adequados; essa correção representa uma economia de 60 a 80% no custo das ferramentas.
O que é um módulo de engrenagem helicoidal e por que ele é importante.
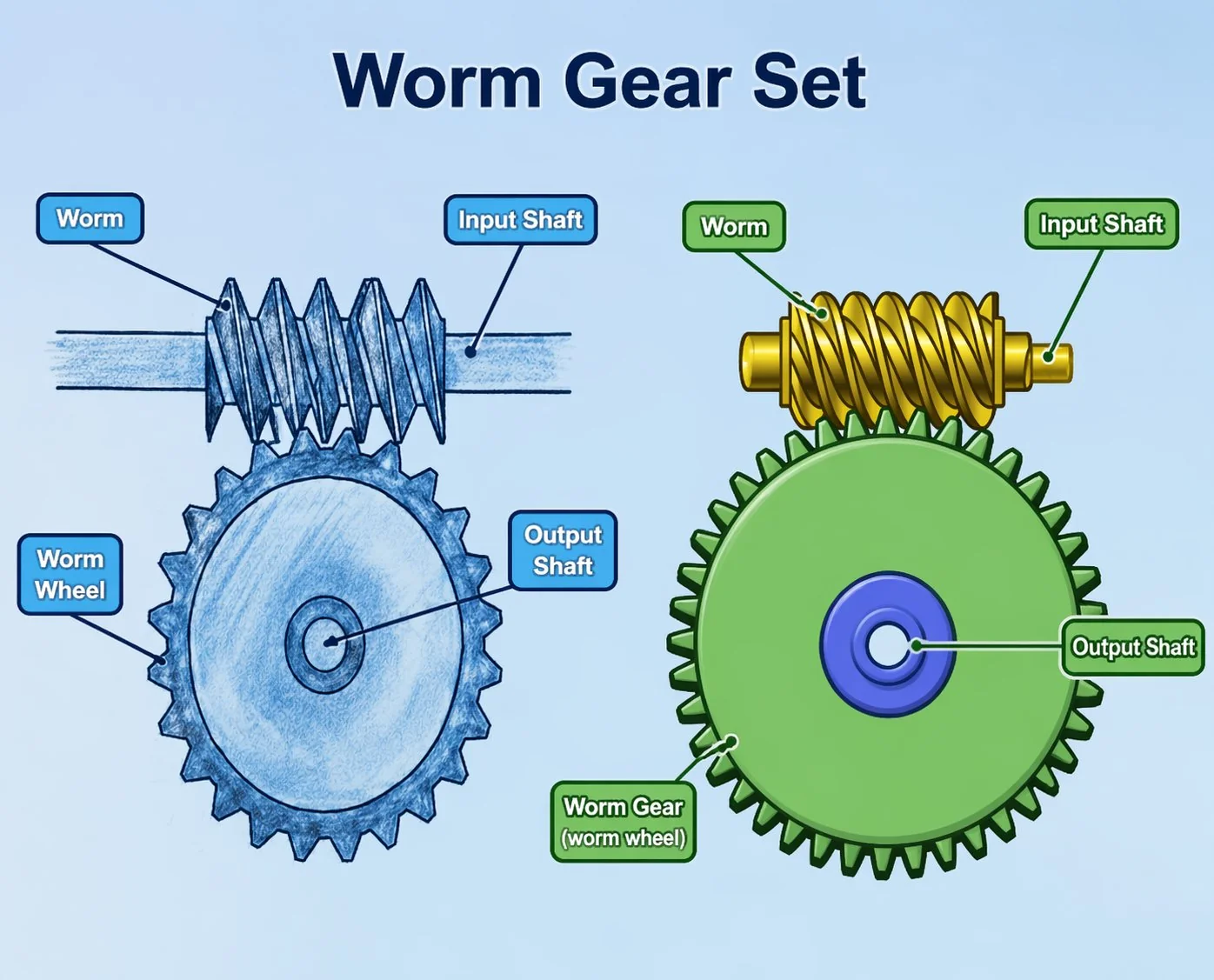
O módulo (m) é o parâmetro métrico básico de tamanho do dente para a engrenagem sem-fim, medido em milímetros. A definição mais simples é geométrica: o módulo é igual ao passo axial dividido por pi, ou m = pₐ / π. Um par de engrenagens sem-fim com passo axial de 12,566 mm tem módulo 4. A relação é a mesma que para engrenagens cilíndricas de dentes retos e helicoidais, onde o módulo define a distância linear entre dentes adjacentes em milímetros do círculo primitivo.
O módulo é o DNA de dimensionamento de todo o par de engrenagens helicoidais. A partir do fluxo do módulo, obtêm-se o diâmetro primitivo da rosca sem-fim (d₁ = m × q), o diâmetro primitivo da coroa (d₂ = m × z₂), a distância entre centros (a = m × (q + z₂) / 2), a altura do dente (h = 2,25 × m), o comprimento da linha de contato, a força tangencial máxima admissível e os cálculos da capacidade de carga de acordo com as normas DIN 3996 e ISO 14521. Se o módulo estiver correto, o restante do projeto se segue de forma autoconsistente. Se estiver incorreto, cada cálculo subsequente propagará o erro.
Para as equipes de projeto de fabricantes de equipamentos originais (OEMs) coreanos e japoneses, a escolha do módulo da engrenagem sem-fim é o primeiro parâmetro definido após a definição do torque de aplicação e da faixa de carga disponível. Pequenos erros na seleção do módulo podem resultar em carcaças superdimensionadas, engrenagens subdimensionadas ou capacidade de carga insuficiente, o que se manifesta como desgaste acelerado entre 18 e 24 meses de uso.
Módulos padrão ISO 54 e o que cada um deles contém
A norma ISO 54 (e a equivalente DIN 780) define os valores de módulo preferenciais e secundários para engrenagens helicoidais. Os módulos preferenciais são 1, 1,25, 1,5, 2, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20 e 25 mm. Existem módulos secundários (1,125, 1,375, 1,75, 2,25, 2,75, 3,5, 4,5, 5,5, 7, 9, 11, 14, 18 e 22 mm), mas são raramente encontrados em estoque.
Cada módulo corresponde a uma faixa de aplicação específica com base no torque de saída. A tabela abaixo relaciona o módulo à distância entre centros típica, ao torque de saída e à classe de aplicação — uma ferramenta de cálculo reverso funcional.
Os valores de torque da engrenagem sem-fim são típicos para roda de bronze fosforoso contra sem-fim de aço cementado, com valor q padrão de 8 a 10, relação de 30:1 a 50:1, perfil de dente ZN ou ZI e ciclo de trabalho normal. Variações de mais ou menos 30 a 40% ocorrem com melhorias no material, classe de precisão e escolha do lubrificante. Use a tabela para a seleção inicial do módulo; refine com o cálculo de resistência conforme a norma DIN 3996 para a especificação final.
Módulo de cálculo reverso a partir do torque de aplicação
O problema prático do projeto de engrenagens helicoidais é o inverso dos problemas teóricos: o engenheiro conhece o torque de saída e a relação de transmissão da aplicação e precisa encontrar o módulo que forneça esse torque a um custo e dimensões aceitáveis. Três etapas tornam o cálculo inverso viável.
Etapa 1 — Aplicar o fator de serviço ao torque de projeto. Multiplique o torque de saída em regime permanente calculado pelo fator de serviço (normalmente de 1,25 a 2,0, dependendo do ciclo de trabalho e da classe de carga de choque). Uma carga permanente de 500 N·m com fator de serviço de 1,5 produz um torque de projeto de 750 N·m.
Passo 2 — Consulte a tabela para encontrar o módulo correspondente. O torque de projeto de 750 N·m está na faixa de m=4,0 (400-800 N·m) — a coluna da tabela fornece a resposta diretamente. A distância entre centros correspondente é de aproximadamente 100 mm.
Etapa 3 — Verificar a distância entre centros e a compatibilidade da relação. Verifique se a = m × (q + z₂) / 2 produz uma distância entre centros razoável com um valor de q aceitável. Para m=4, o objetivo é a=100 mm, com uma proporção de 50:1 (z₂=50): q = 2(100)/4 − 50 = 0. Inviável — q deve ser positivo e, idealmente, entre 8 e 12. A solução é aumentar a distância entre centros para 125 mm (m=4 ainda funciona, q = 2(125)/4 − 50 = 12,5, viável) ou aceitar uma proporção menor com uma distância entre centros de 100 mm.
O processo de três etapas leva cerca de 10 a 15 minutos por projeto e evita os erros mais comuns nas especificações do módulo. Ignorar a verificação da compatibilidade da distância entre centros resulta em projetos que parecem corretos no papel, mas que não podem ser fabricados no módulo escolhido.
Uma fabricante japonesa de máquinas têxteis submeteu uma especificação de engrenagem helicoidal com módulo 2,5 para uma aplicação que calculava um torque de saída de 175 N·m com fator de serviço de 1,4. A escolha ficou no limite superior da faixa de capacidade m=2,5 (100-200 N·m). A revisão de engenharia de qualidade propôs um aumento para o módulo 3,0 — um aumento de 20% no tamanho do módulo, menos de 8% no custo unitário da engrenagem helicoidal, mas deslocando o ponto de operação de 87% da capacidade m=2,5 para 44% da capacidade m=3,0. A diferença na utilização da capacidade se traduziu em uma vida útil esperada aproximadamente 30% maior, pois a tensão de contato diminui com a raiz quadrada do aumento do módulo. Diferença de custo anual para a produção de 240 unidades: US$ 4.300 em peças. Economia anual com intervalos de substituição mais longos: US$ 18.000 em comparação com substituições no meio da vida útil com a especificação m=2,5. O aumento de 0,5 módulo tornou-se efetivamente gratuito após o segundo ano. Verifique sempre se o módulo escolhido opera no terço superior da sua faixa de torque — se sim, o módulo imediatamente superior geralmente é melhor.
Módulo, q e distância entre centros — o triângulo de acoplamento
O módulo de engrenagem helicoidal não existe isoladamente. Ele está vinculado à distância entre centros (a) e ao quociente de diâmetros (q) pela equação a = m × (q + z₂) / 2. Três das quatro variáveis (m, a, q, z₂) são tipicamente restringidas pela aplicação — a quarta, então, precisa satisfazer a equação. O truque é reconhecer quais três são restringidas e qual é livre.
Cenário de restrição 1 — envelope fixo. A embalagem da aplicação determina a distância entre centros (por exemplo, a = 100 mm para a carcaça existente). A relação necessária fixa z₂ (por exemplo, 50 dentes para uma relação de 50:1 com rosca sem-fim de entrada única). O módulo é então restringido para fornecer um valor q aceitável: m = 2a / (q + z₂). Para um q típico de 10, m = 2(100) / (10 + 50) = 3,33 — não padrão. Os valores padrão m=3 (q calculado é 16,67) ou m=4 (q calculado é 0, inviável) são os candidatos. Escolha m=3 com q mais alto.
Cenário de restrição 2 — módulo fixo devido à exigência de torque. O torque de saída da aplicação determina o módulo (por exemplo, m = 4,0 para 600 N·m). A relação necessária fixa z₂. A distância entre centros torna-se o valor derivado: a = m × (q + z₂) / 2. Para m=4, q=10, z₂=50, a = 4(10+50)/2 = 120 mm — não conforme o padrão R10. Os valores R10 mais próximos são 100 mm (q=0, inviável) ou 125 mm (q=12,5, viável). Escolha a = 125 mm com q=12,5.
Cenário de restrição 3 — q fixo devido à capacidade do fornecedor. Alguns fornecedores têm em estoque valores q padrão (q = 8, 10, 12 são os mais comuns). A proporção necessária fixa z₂. O módulo e a distância entre centros devem satisfazer a equação conjuntamente. Para q = 10 e z₂ = 50, a relação a = m × 30 significa que m = 4 resulta em a = 120 mm, m = 3 resulta em a = 90 mm e m = 5 resulta em a = 150 mm. Somente m = 3 produz um valor próximo a uma distância entre centros padrão (90 mm está entre R10 80 e 100 — veja nossa metodologia de cálculo da distância do centro para resolver isso).
Módulo, passo circular e passo diametral — três sistemas de medição

Existem três sistemas de medição do tamanho dos dentes para especificação de engrenagens helicoidais em todo o mundo. O módulo (m, mm) predomina na Europa, Ásia e na maior parte do mundo. O passo circular (CP, polegadas) foi historicamente usado em algumas especificações imperiais. O passo diametral (DP, dentes por polegada) predomina no uso da AGMA americana.
A aquisição de engrenagens helicoidais de diferentes fornecedores exige uma conversão fluida entre os três. Fabricantes de equipamentos originais (OEMs) coreanos e japoneses que atendem clientes norte-americanos frequentemente se deparam com os três no mesmo projeto.
Módulo para passo circular: CP = π × m. O módulo 2 corresponde a CP = 6,283 mm (ou 0,247 polegadas). O módulo 4 corresponde a CP = 12,566 mm.
Módulo para passo diametral: DP = 25,4 / m. O módulo 2 corresponde a DP = 12,7. O módulo 4 corresponde a DP = 6,35. A conversão é recíproca — um módulo menor resulta em um DP maior. Os tamanhos comuns de engrenagens helicoidais americanas são DP 8, 10, 12 — correspondendo aproximadamente aos módulos 3,18, 2,54 e 2,12 (nenhum deles corresponde aos valores de módulo ISO padrão, razão pela qual as engrenagens helicoidais imperiais e métricas não são diretamente intercambiáveis).
Implicação prática. UM engrenagem sem-fim A especificação “10 DP” é aproximadamente equivalente ao módulo 2.54 — não padronizado em sistema métrico, sem correspondência direta no catálogo. A substituição entre sistemas sempre envolve algum tipo de concessão; o caminho mais seguro é a correspondência entre os sistemas no momento da especificação original.
Três casos reais de seleção de módulos de engrenagem helicoidal

Os três casos abaixo ilustram três padrões diferentes de seleção de módulos de engrenagem helicoidal: escolher o menor entre dois módulos adjacentes no limite superior da capacidade, optar pela suavidade quando a capacidade é ampla e converter um módulo não padrão em padrão por meio da modificação da carcaça.
Cada padrão é a resposta certa para o seu contexto de aplicação — a habilidade em compras consiste em reconhecer qual padrão se aplica.
Caso 1 — Fabricante coreano de esteiras transportadoras escolhe o módulo 3
Um fabricante coreano de transportadores de peças precisava de um par de engrenagens helicoidais para uma nova linha de produção de transportadores de correia. O torque de saída calculado para a aplicação era de 280 N·m em regime permanente, com um fator de serviço de 1,5, resultando em um torque de projeto de 420 N·m. A relação necessária era de 40:1 para corresponder à velocidade desejada da correia. A consulta à tabela de módulos indicou que 420 N·m estava próximo do limite entre m=3 (200-400 N·m) e m=4 (400-800 N·m). A revisão de engenharia optou por m=3, pois o torque de projeto estava em 105% da capacidade de m=3 — marginal, mas aceitável para o ciclo de trabalho de 16 horas por dia, com uma economia de custo de aproximadamente 15% no par de engrenagens helicoidais em comparação com m=4. A distância entre centros foi calculada em 80 mm para q=10 e z₂=40 (a = 3 × 50 / 2 = 75 mm — próximo ao padrão R10 de 80 mm com q=13,3). Decisão: m=3, a=80 mm, q=13,3, z₂=40. Vida útil em campo ao longo de 6 anos em 180 unidades instaladas: média de 5,5 anos antes da substituição da roda de bronze, ligeiramente abaixo da meta típica de 7 anos, mas aceitável para a aplicação em transportador. Lição: escolher o menor de dois módulos de engrenagem helicoidal adjacentes no limite superior da capacidade é uma otimização de custos defensável quando o ciclo de trabalho é moderado.
Caso 2 — Fabricante japonês de máquinas-ferramenta seleciona o módulo 2.5 para maior suavidade.
Um fabricante japonês de indexadores rotativos especificou um par de engrenagens helicoidais de alta precisão para uma mesa rotativa de 12 estações com repetibilidade de posicionamento de ± 6 segundos de arco. O torque de saída da aplicação era moderado, com pico de 65 N·m; tanto o módulo 2.0 quanto o módulo 2.5 estavam dentro da faixa de capacidade. Critério de seleção: suavidade de movimento. Um módulo menor produz um passo mais curto e mais dentes engrenados por rotação da engrenagem helicoidal, o que se traduz em uma saída de posição angular mais suave. Cálculo: m=2.0 resultou em 36% de utilização da capacidade, m=2.5 em 33% e m=3.0 em 22%. Tanto m=2 quanto m=2.5 eram aceitáveis em termos de capacidade. Decisão: m=2.5 para melhor área de contato entre os dentes e maior vida útil, aceitando uma suavidade ligeiramente menor do que a proporcionada por m=2. Par final: m=2.5, a=63 mm, q=10, z₂=40, relação 40:1, retificado por ZI. A repetibilidade da indexação foi medida em mais ou menos 4,2 segundos de arco, excedendo o requisito de 6 segundos de arco. Lição: quando a capacidade é ampla, a escolha do módulo tende a priorizar uma vida útil mais longa; quando a capacidade é limitada, a escolha do módulo tende a priorizar uma margem de torque maior.
Caso 3 — Oficina de reparos vietnamita evita módulo não padrão 3.5
Uma oficina de reparos vietnamita recebeu uma máquina importada da Europa com uma engrenagem sem-fim danificada. Especificação original: módulo 3,5, distância entre centros de 90 mm, relação de 31:1. Tanto o módulo quanto a distância entre centros não eram valores padrão ISO. Fornecedores de catálogo na Coreia, Japão e China retornaram orçamentos para peças “não padronizadas, somente sob encomenda” a US$ 1.400 o par, com prazo de entrega de 8 a 10 semanas. A análise de engenharia propôs a conversão para o módulo padrão 3 ou 4. O módulo 3 deslocaria a distância entre centros para 90 mm, com q calculado para 9 — próximo ao original, mas com capacidade de torque reduzida. O módulo 4 deslocaria a distância entre centros para 100 mm, com q = 10 — exigindo uma pequena modificação na carcaça. Decisão: módulo 4 com nova placa de montagem para acomodar a mudança de 10 mm na distância entre centros. Par de peças padrão de catálogo a US$ 380 o par, com prazo de entrega de 1 semana. A modificação da placa de montagem da carcaça levou 2 horas de usinagem na oficina local. Economia total em relação à peça sob encomenda: US$ 1.020 o par, mais 7 semanas de prazo de entrega. O cliente voltou a operar 4 semanas antes do que o caminho personalizado teria permitido. Lição: módulos não padronizados geralmente surgem de projetos antigos e raramente justificam o custo adicional da personalização; converter para um módulo padrão com pequenas modificações na estrutura quase sempre é mais vantajoso economicamente. Navegue redutor de engrenagem helicoidal Opções que alinham o módulo aos valores da norma ISO 54 para acesso rápido ao catálogo.
Perguntas frequentes
P: Qual a diferença entre módulo axial e módulo normal?
O módulo axial (mₐ ou mₓ) é o módulo medido no plano axial da rosca sem-fim — o plano que contém o eixo da rosca. O módulo normal (mₙ) é o módulo medido perpendicularmente à hélice da rosca sem-fim. Os dois estão relacionados por mₙ = mₐ × cos γ, onde γ é o ângulo de inclinação da rosca sem-fim. Para roscas sem-fim típicas com baixo ângulo de inclinação (γ menor que 10 graus), a diferença entre o módulo axial e o módulo normal é pequena (tipicamente de 1 a 2%). Para roscas sem-fim com alto ângulo de inclinação (γ maior que 20 graus), a diferença torna-se significativa. Convenção de especificação: os pares de engrenagens sem-fim do tipo ZA usam o módulo axial por padrão; ZN, ZI, ZK e ZC usam o módulo normal. Sempre verifique qual convenção o fornecedor utiliza para evitar confusão na revisão do projeto.
P: Posso usar um módulo não padrão se minha aplicação realmente precisar dele?
Sim, mas com um custo adicional significativo. Módulos não padronizados exigem um novo projeto de fresa e ferramentas, o que normalmente adiciona de 2.000 a 6.000 dólares ao custo da primeira peça e de 4 a 8 semanas ao prazo de entrega. As fresas personalizadas ficam armazenadas pelo fornecedor para futuras encomendas, o que aumenta o custo de estoque. A justificativa para módulos não padronizados é rara na prática — a maioria dos requisitos de "módulo não padronizado obrigatório" acaba sendo, após análise, flexível. Os poucos casos realmente fixos envolvem peças de reposição para equipamentos antigos, onde modificar a carcaça é impraticável, ou indexadores de precisão, onde a escolha do módulo está vinculada à taxa de indexação de uma forma que nenhum módulo padrão satisfaz. Para esses casos, o custo adicional é justificado; para todos os outros, o caminho do módulo padrão economiza tempo e dinheiro significativos.
P: Como posso verificar o módulo de uma engrenagem sem-fim existente?
Três métodos de medição. Primeiro, conte os dentes da engrenagem (z₂) e meça o diâmetro primitivo da engrenagem (d₂) — o módulo é então m = d₂ / z₂. O diâmetro primitivo é aproximadamente igual ao diâmetro externo da engrenagem menos 2 × módulo, o que serve como uma verificação de consistência. Segundo, meça o passo axial da rosca sem-fim (pₐ) — a distância entre as cristas das roscas adjacentes ao longo do eixo da rosca sem-fim. O módulo é então m = pₐ / π. Terceiro, use um calibrador de dentes de engrenagem ou um medidor de fio e pino para medir a profundidade da rosca sem-fim. O primeiro método é o mais simples e confiável. Para uma engrenagem com d₂ = 160 mm e 40 dentes, o módulo = 160 / 40 = 4,0. Módulo padrão ISO 54 — confirmado.
P: Por que o módulo 1,25 é um valor preferencial na norma ISO 54, mas o módulo 1,125 é secundário?
A norma ISO 54 baseia-se nos números preferenciais de Renard (série R10, incremento de 1,25). Módulos preferenciais: 1, 1,25, 1,5, 2, 2,5, 3, 4, 5, 6, 8, 10, 12, 16, 20, 25. Os módulos secundários utilizam os valores da série R20 para incrementos menores. Para a maioria das aquisições de engrenagens helicoidais, a abordagem correta é utilizar apenas os números preferenciais.
P: A escolha do módulo afeta a eficiência?
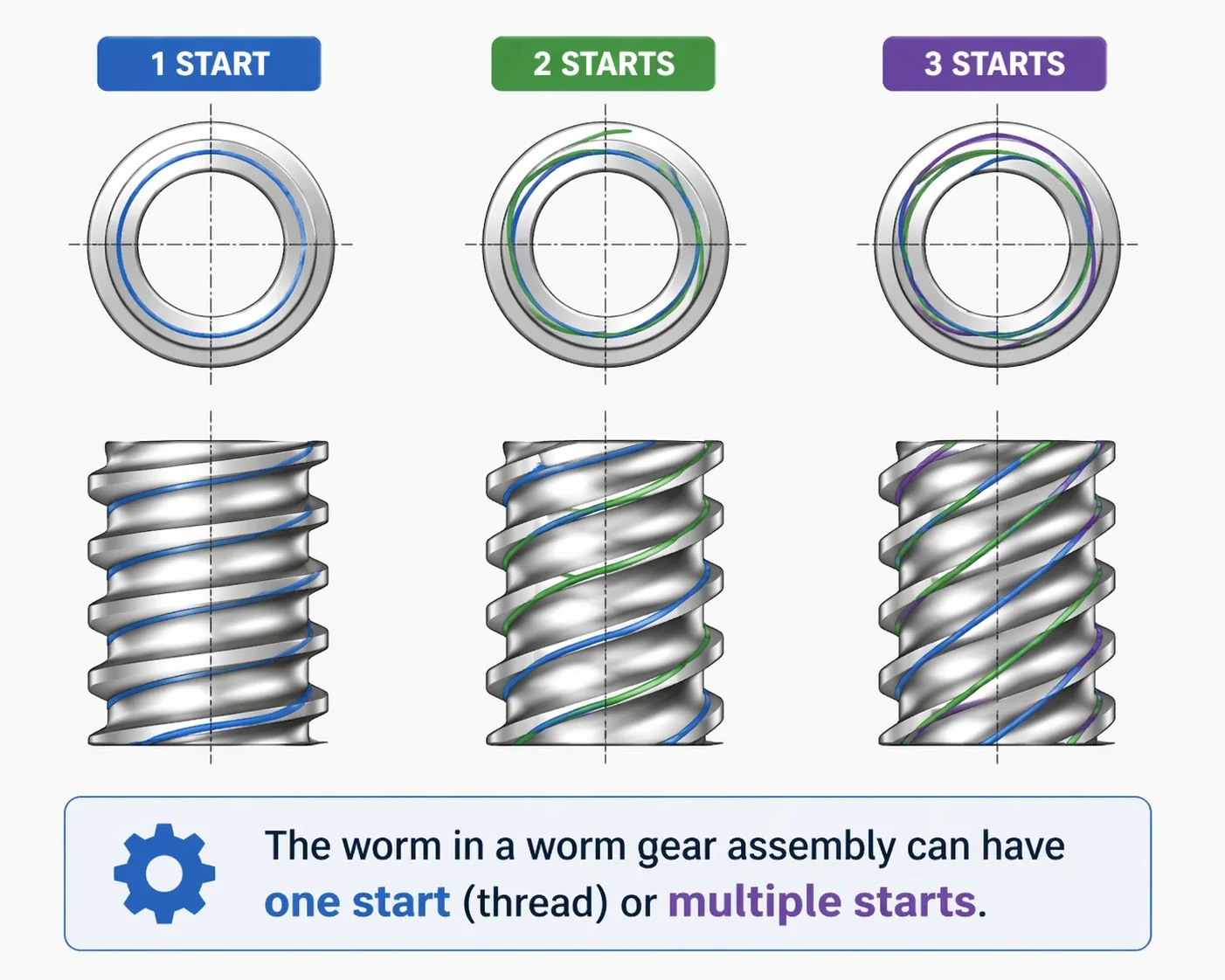
Indiretamente, sim — o módulo está ligado ao ângulo de passo (γ) pela equação tan γ = z₁ / q, onde z₁ é o número de entradas da rosca sem-fim e q é o quociente de diâmetro. Módulos menores com o mesmo q produzem diâmetros de passo da rosca sem-fim menores e ângulos de passo ligeiramente diferentes, dependendo de z₁. O ângulo de passo é o principal fator determinante da eficiência — ângulos de passo maiores produzem maior eficiência. A relação entre módulo e eficiência é, portanto, secundária, atuando por meio do ângulo de passo. Para fins práticos de projeto, otimize o ângulo de passo diretamente (por meio de z₁ e q) em vez de tentar manipular a eficiência por meio da escolha do módulo. A diferença de eficiência entre módulos adjacentes com o mesmo ângulo de passo é tipicamente inferior a 2%.
P: Qual é o menor módulo prático para engrenagens helicoidais industriais?
Para aplicações industriais, o módulo 1,0 é o limite inferior prático. Abaixo do módulo 1, a produção transita para técnicas de instrumentação de precisão — ferramentas diferentes, equipamentos de inspeção e base de fornecedores. Pares de engrenagens helicoidais de módulo 0,5 e 0,75 existem para instrumentos de precisão e equipamentos de laboratório, mas normalmente são provenientes de fornecedores especializados (KHK, SDP-SI) em vez de catálogos gerais de engrenagens helicoidais industriais. O torque de saída no módulo 0,5 é de aproximadamente 1 a 3 N·m. O estoque de catálogos abaixo do módulo 1 é significativamente menor do que no módulo 1 e acima.
P: Devo sempre especificar o menor módulo que atenda ao torque exigido?
Não necessariamente. O menor módulo de engrenagem helicoidal que atenda à capacidade oferece o menor custo e o menor tamanho, mas opera com alta utilização (frequentemente entre 80% e 100% da capacidade nominal). Alta utilização significa vida útil mais próxima do mínimo projetado e maior sensibilidade a variações de carga. Aumentar o tamanho do módulo em uma unidade normalmente eleva o custo unitário em 8% a 15%, mas reduz a utilização de 80% a 100% para 40% a 60% — o que se traduz em uma vida útil 30% a 80% maior e maior tolerância a variações de carga. O módulo economicamente ideal geralmente é um nível acima do mínimo — e não o mínimo em si. A exceção são aplicações com restrição de espaço, onde o módulo maior não cabe fisicamente; nesses casos, o módulo mínimo deve ser aceito e a menor vida útil deve ser considerada no plano de manutenção.
O módulo da engrenagem sem-fim é o DNA de dimensionamento do par — altere-o e todos os outros parâmetros respondem (diâmetro primitivo, distância entre centros, altura do dente, linha de contato, capacidade de carga). Os 10 módulos padrão, de m=1,0 a m=10,0, cobrem aproximadamente 90% da demanda industrial, e a escolha correta para uma determinada aplicação resulta de um cálculo inverso em três etapas: aplique o fator de serviço ao torque, consulte o módulo correspondente na tabela e verifique a compatibilidade da distância entre centros com q. Ignorar a etapa de verificação é a causa mais comum de projetos que parecem corretos no papel, mas falham na viabilidade de fabricação. O módulo economicamente ideal é normalmente um nível acima do mínimo que atende à capacidade — o pequeno acréscimo de custo proporciona uma vida útil significativamente maior e uma tolerância mais ampla à inevitável variação de carga no mundo real.
Módulo de cálculo reverso para uma nova aplicação de engrenagem helicoidal?
Envie as restrições de torque, relação, ciclo de trabalho e envelope da aplicação. Executaremos o cálculo reverso do módulo em três etapas, recomendaremos o módulo correto da série preferencial ISO 54 e confirmaremos a compatibilidade da distância entre centros — normalmente dentro de um dia útil coreano para especificações de catálogo padrão.
Editor: Cxm


























