Korea Ever-Power · Application Engineering Guide
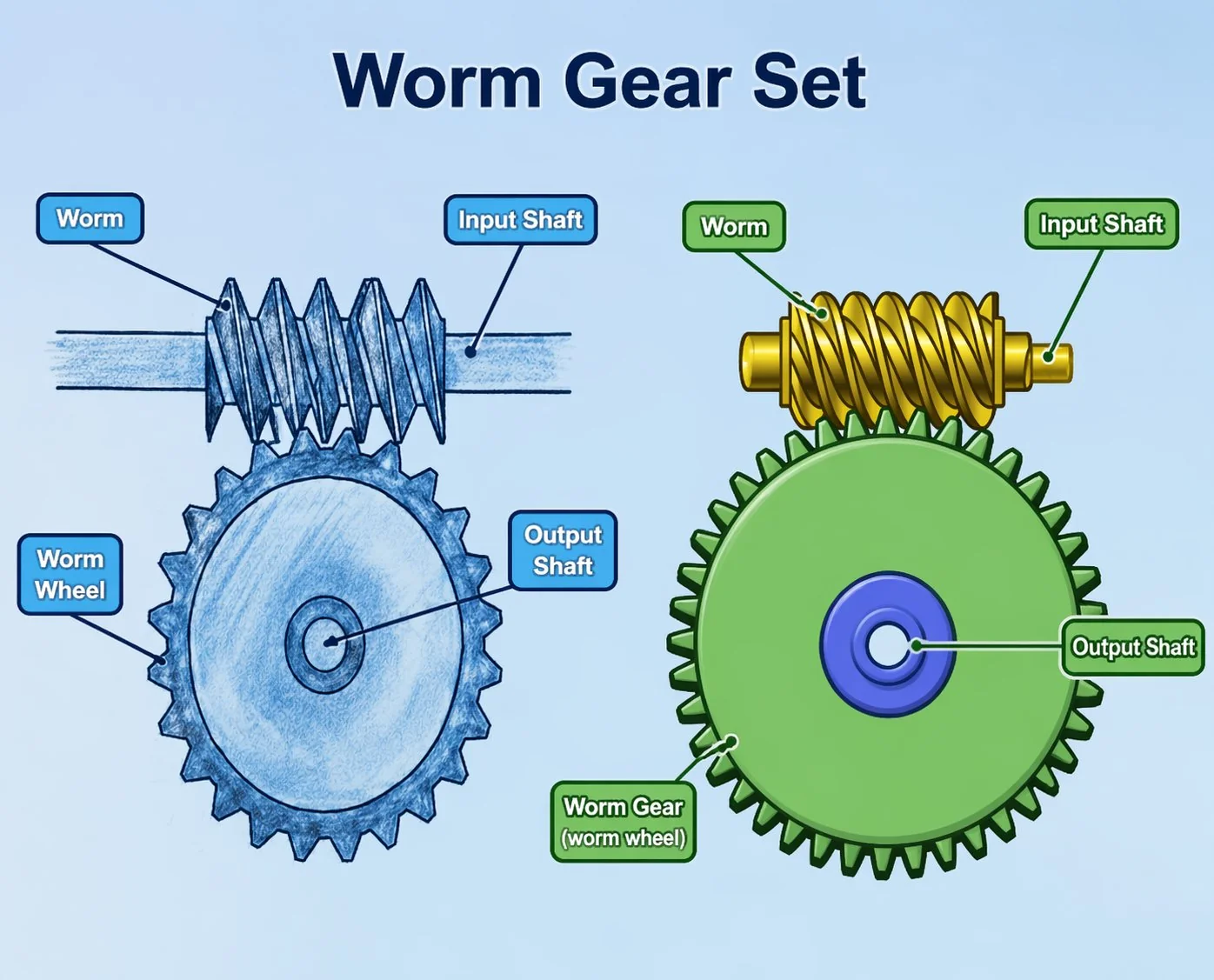
Worm and Worm Wheel for Solar Tracker Slew Drives
A solar farm with 5,000 trackers tracks the sun from east to west every day for 25 years — roughly 9,000 dawn-to-dusk cycles per tracker. Each tracker holds 60 square metres of solar panels that act as a sail in the wind, generating thrust loads of 2,000 to 8,000 N depending on wind speed. The worm gear pair inside the slew drive is the only component between the panel and the wind — it must hold position in a 40 m/s gust, track smoothly at 15 degrees per hour, and survive 25 years of outdoor UV, rain, and temperature cycling without a major overhaul.
Solar tracker slew drives use worm gear pairs because self-locking holds the panel angle against wind loads without continuous motor power, the slow tracking speed (15 degrees per hour for single-axis) matches the high-ratio, low-speed output of a worm gear pair, and the integrated slew drive format (worm gear pair plus bearing plus housing in a single sealed unit) provides a compact, field-installable module. The dawn-to-dusk duty model maps the daily tracking cycle to annual operating hours (3,000 to 5,000), the 25-year lifetime duty (75,000 to 125,000 operating hours), and the maintenance scheduling that this extreme service life demands. Wind load is the dominant design force — a 60 m² panel in a 40 m/s wind generates approximately 12,000 N of thrust, producing 2,400 to 6,000 N·m of torque at the slew drive depending on the moment arm. The worm gear pair must hold this load statically through self-locking while the motor is off — which is 90 percent of the time (the tracker moves slowly, then holds position while the panels generate power).
Why solar trackers use worm gear slew drives
A solar tracker rotates a panel array to follow the sun across the sky, increasing energy capture by 25 to 40 percent compared to a fixed-tilt installation. Single-axis trackers rotate east-to-west around a horizontal north-south axis. Dual-axis trackers add a tilt axis for seasonal elevation adjustment. Both types require a worm gear drive that moves very slowly (the sun traverses 15 degrees per hour), holds position rigidly against wind (the panel is a large sail), and survives 25 years outdoors with minimal maintenance.
The worm gear slew drive — an integrated unit containing a worm gear pair, a slewing bearing, and a sealed housing — has become the standard for solar trackers because it delivers all three requirements in a single bolt-on module.
Self-locking holds the panel at its tracking angle against wind gusts without motor power. The worm gear motor is off 85 to 95 percent of the time — the worm gear tracker adjusts position every 5 to 15 minutes in small increments, then holds. During a wind storm, the tracker may stow flat (horizontal) and the self-locking holds it there for hours or days.
The sun moves at 15 degrees per hour. A worm gear pair at 60:1 ratio with a small DC motor at 30 RPM produces 0.5 RPM output — 3 degrees per minute at the tracker axis. The controller pulses the worm gear motor for a few seconds every 10 to 15 minutes to track the sun. Total daily motor running time: 15 to 45 minutes.
Solar panels carry 25-year performance warranties. The tracker mechanism must match this lifetime — no scheduled overhaul, no wheel replacement, no re-lubrication in many installations. This demands sealed-for-life grease, UV-resistant seals, and corrosion-protected housings that endure 9,000+ day/night thermal cycles.
Dawn-to-dusk duty model — daily tracking cycle to 25-year lifetime specification
The solar tracker worm gear pair has a unique duty profile: very light loads during tracking (motor torque only, no external load), very heavy static loads during wind events (full wind thrust, motor off), and a highly predictable daily cycle that repeats 365 days per year for 25 years. The dawn-to-dusk model quantifies this cycle.
The model reveals a critical insight: the worm gear pair motor runs only 120 hours per year (morning return + evening stow + intermittent tracking pulses) — but the self-locking function is active 8,640 hours per year (the full 24-hour day minus the brief motor-running periods). Over 25 years, the total worm gear motor-driven hours are only 3,000 — trivially low for mechanical wear. But the total static-hold hours (self-locking under wind load) are approximately 216,000 hours. The design challenge is not mechanical wear from motion — it is static corrosion, seal degradation, and grease life over 25 years of continuous outdoor exposure with minimal rotation to redistribute lubricant.
Wind load — the panel as a sail and the worm gear pair as an anchor

A solar panel array is aerodynamically similar to a flat plate — a shape that produces the highest drag coefficient (Cd 1.1 to 1.3 for flat plate perpendicular to wind) of any structure. The wind thrust force on a 60 m² single-axis tracker at 40 m/s design wind speed is F = 0.5 × 1.225 × 40² × 1.2 × 60 = approximately 70,560 N (in the worst-case perpendicular orientation). In practice, the tracker stows flat (reducing the effective area by 80 to 90 percent) before extreme wind arrives, reducing the actual force to approximately 7,000 to 14,000 N in stow position.
The torque at the slew drive depends on the moment arm between the wind force centre of pressure and the tracker rotation axis. For a single-axis tracker with a 12-metre torque tube: moment arm is approximately 1 to 3 metres (eccentricity between force centre and axis), producing 7,000 to 42,000 N·m of wind torque in stow. The worm gear pair must resist this torque statically through self-locking — and the self-locking holding capacity must exceed the maximum design wind torque with a safety factor of 1.5 to 2.0 per structural design codes (ASCE 7, Eurocode 1).
A Korean solar farm developer installed 2,400 single-axis trackers across a 50 MW photovoltaic plant. Each tracker used a worm gear slew drive rated at 3,500 N·m holding torque. In the third year, Typhoon Hinnamnor (September 2022) brought sustained 45 m/s winds to the site. All trackers stowed flat before the typhoon arrived. Post-typhoon inspection found 18 trackers with the panel array rotated 15 to 25 degrees from the stow position — the self-locking had slipped under the extreme wind torque. Investigation: the calculated wind torque at 45 m/s on the stowed panels was 4,200 N·m — exceeding the 3,500 N·m rated holding torque by 20 percent. The original specification had used a 35 m/s design wind (the site’s 50-year return period), but the actual typhoon exceeded this by 29 percent. No structural damage occurred (the panels had tilted but not detached), but the 18 trackers required manual repositioning and re-alignment. Corrective action: 18 slew drives replaced with 6,000 N·m rated units. The remaining 2,382 trackers retained the 3,500 N·m drives (which had held at the 45 m/s wind — the 18 failures occurred on the windward edge of the array where wind acceleration produced locally higher forces). Lesson: solar tracker worm gear slew drive holding torque must be specified for the extreme wind event, not the average design wind — and edge-row trackers in large arrays experience 15 to 30 percent higher wind loads than interior rows due to wind channelling.

Three solar tracker worm gear slew drive specification cases
Case 1 — Korean utility solar farm: 2,400 single-axis trackers, typhoon zone, 25-year life
A Korean 50 MW solar farm specified worm gear slew drives for 2,400 single-axis trackers. Panel area per tracker: 60 m² (24 modules × 2.5 m²). Torque tube length: 12 metres. Design wind: 45 m/s (corrected post-Typhoon Hinnamnor). Self-locking holding torque requirement: 6,000 N·m (edge rows), 4,500 N·m (interior rows). Tracking output speed: 0.5 RPM. Worm gear slew drive: single-start, module 3, centre distance 80 mm, integrated slewing bearing (Ø300 mm), ratio 62:1. Motor: 24 V DC, 100 W. Material: zinc-plated worm, phosphor bronze wheel. Seal: FKM double lip with UV-resistant elastomer, IP66. Grease: synthetic polyurea (sealed for life — no re-lubrication in 25 years). Housing: hot-dip galvanised cast iron. Cost per slew drive: 280 USD (edge-row 6,000 N·m version), 195 USD (interior 4,500 N·m version). Total slew drive cost for 2,400 trackers: approximately 520,000 USD. Annual energy gain from tracking versus fixed tilt: approximately 14 million kWh × 0.08 USD = 1,120,000 USD per year — the slew drive investment recovers in under 6 months.
Case 2 — Japanese rooftop dual-axis tracker: 10 m², building-mounted, aesthetic
A Japanese building-integrated solar company specified worm gear slew drives for a dual-axis rooftop tracker (4 modules, 10 m²). Two slew drives per tracker: one for azimuth (horizontal rotation) and one for elevation (tilt). The rooftop installation required compact dimensions (the slew drive must not extend beyond the tracker footprint), low noise (residential building — below 45 dB(A) during tracking), and aesthetic housing (powder-coated to match the tracker frame colour). Design wind: 35 m/s. Holding torque per axis: 800 N·m. Worm gear slew drive: single-start, module 2, centre distance 50 mm, integrated bearing Ø150 mm, ratio 50:1. Motor: 12 V DC, 30 W. Material: zinc-plated worm, POM wheel (noise reduction — POM at 38 dB(A) versus bronze at 48 dB(A) during tracking). Grease: synthetic polyurea, sealed for life. Housing: powder-coated aluminium (weight reduction for rooftop structural load). Cost per slew drive: 85 USD. Two per tracker: 170 USD. Browse wormwieloverbrenging options for solar tracker single-axis and dual-axis applications.
Case 3 — Vietnamese floating solar: single-axis, IP68 submersible, corrosion-resistant
A Vietnamese floating solar developer specified worm gear slew drives for 800 single-axis trackers on a reservoir surface. The floating installation added challenges absent from ground-mounted trackers: intermittent submersion during wave action and heavy rain (IP68 required), freshwater corrosion from permanent humidity exposure, and algae fouling of the housing exterior. Panel area per tracker: 40 m² (16 modules). Design wind: 30 m/s (inland reservoir — lower than coastal). Holding torque: 2,800 N·m. Worm gear slew drive: single-start, module 2.5, centre distance 63 mm, integrated bearing Ø200 mm, ratio 55:1. Material: 304 stainless worm (permanent water exposure), phosphor bronze wheel. Seal: IP68 double mechanical seal with pressurised grease chamber. Housing: epoxy-coated marine-grade cast iron with anti-fouling paint. Cost per slew drive: 340 USD (the IP68 and stainless specification added 60 percent over the equivalent ground-mounted version at 195 USD). Total for 800 trackers: 272,000 USD. The floating specification demonstrates that the same worm gear slew drive architecture applies to water-surface installations — the core self-locking and tracking functions are identical, with the environmental protection upgraded to match the submersion exposure.
Veelgestelde vragen
Q: Can a solar tracker worm gear slew drive really last 25 years without re-lubrication?
With synthetic polyurea grease sealed inside a properly designed housing, yes — the total motor-driven operating hours over 25 years are only 3,000, which is less than one year of operation for a typical industrial gearbox. The grease life at this light duty and moderate temperature (outdoor ambient) exceeds 25 years. The life-limiting factor is not grease degradation but seal integrity — if the seal fails and water enters, the grease emulsifies and corrosion begins. FKM seals with UV-resistant formulation maintain integrity for 15 to 20 years in outdoor exposure. At Year 15, a visual seal inspection and optional grease top-up through a grease fitting is prudent insurance — adding 15 minutes of labour per tracker.
Q: How do I calculate the wind torque on my tracker for slew drive sizing?
T_wind at the worm gear slew drive = F_wind × L_arm. F_wind = 0.5 × ρ × v² × Cd × A_eff. For a stowed (flat) tracker: ρ = 1.225 kg/m³, Cd = 0.1 to 0.2 (flat plate at near-zero angle), A_eff = panel area × cos(stow angle). L_arm = distance from rotation axis to the centre of pressure (typically 0.5 to 2 metres for single-axis trackers depending on panel arrangement symmetry). Apply a safety factor of 1.5 per ASCE 7 or Eurocode 1. For edge-row trackers, multiply by 1.2 to 1.3 for wind channelling. The critical case is usually the stowed position during extreme wind — not the tracking position during normal operation (trackers stow before extreme wind arrives).
Q: Why do some solar trackers use linear actuators instead of slew drives?
Linear actuators (electric cylinders) are used on smaller trackers (below 30 m² panel area) where the wind torque is within the linear actuator’s thrust capacity. Linear actuators are simpler than worm gear slew drives and cheaper for small panels but cannot scale to large trackers because the thrust force required grows with panel area while the linear actuator cylinder diameter and stroke length become impractical above approximately 3,000 N·m of torque. Slew drives scale efficiently to 20,000+ N·m holding torque — they dominate the utility-scale tracker market (40 to 100+ m² per tracker). The two technologies coexist: linear actuators for residential and small commercial, slew drives for utility-scale.
Q: What happens if the self-locking fails during a wind event?
The panel array rotates uncontrolled from the stow position, increasing the effective wind area from near-zero (flat) to the full panel area (perpendicular to wind). This dramatically increases the wind force — from the stow-position 7,000 N to the perpendicular 70,000 N — producing a structural overload that can bend the torque tube, tear panel clamps, or uproot the tracker foundation. Self-locking failure during a wind event is a structural failure scenario, not just a maintenance issue. Design the worm gear self-locking holding torque with a safety factor of 1.5 to 2.0 above the calculated extreme wind torque. Test the self-locking at 150 percent of the rated holding torque during factory acceptance — the test must show zero rotation after 1 hour of static loading.
Q: What is the typical cost of a solar tracker slew drive per watt of solar capacity?
For utility-scale single-axis trackers: the slew drive costs 195 to 350 USD per tracker, and each tracker supports 15 to 30 kW of solar capacity. This translates to approximately 0.007 to 0.023 USD per watt of installed solar capacity — roughly 1 to 3 percent of the total tracker system cost and 0.3 to 0.8 percent of the total solar plant cost. The slew drive is one of the lowest-cost components per watt — but one of the highest-consequence components if it fails (a failed slew drive takes an entire tracker offline, losing 15 to 30 kW of generation until repaired).
Solar tracker worm gear slew drives operate in a duty regime unlike any other application in this series — extremely light mechanical wear (3,000 motor hours over 25 years) combined with extremely demanding environmental endurance (216,000 hours of outdoor static exposure with continuous wind-load holding). The dawn-to-dusk duty model maps this unique cycle to the specification parameters that matter: self-locking holding torque for wind events (the dominant design force), seal and grease life for 25-year maintenance-free outdoor exposure (the dominant life-limiting factor), and UV and corrosion resistance for multi-decade service. The worm gear slew drive has become the standard for utility-scale solar trackers because no other drive technology delivers self-locking wind resistance, ultra-slow tracking capability, and 25-year outdoor durability in a single integrated module at the cost point that solar economics demand.
For solar tracker manufacturers and solar farm developers, our engineering desk calculates the wind torque from your panel configuration and site wind data. Standard catalogue slew drive worm gear sets cover single-axis and dual-axis applications from Ø150 to Ø400 mm bearing diameter with 800 to 8,000 N·m holding torque. Submit a solar tracker drive specification with panel area, design wind speed, tracker type (single/dual axis), and site climate zone.
Specifying slew drives for solar trackers?
Send panel area, design wind speed, tracker type, site climate, and quantity. We will calculate the wind torque, recommend the holding torque class, and provide 25-year duty life verification for your installation.
Redacteur: Cxm


























