蜗轮蜗杆传动机构的齿隙并非单一数值,而是五个因素共同作用的结果:键槽间隙、轮毂与轴的配合、输出轴承径向间隙、齿廓间隙以及热膨胀系数不匹配。在轮缘处测得的总齿隙,一般工业传动机构通常为 0.05 至 0.30 毫米,而精密分度传动机构则为 0.02 至 0.05 毫米。要将总齿隙降低到 0.02 毫米以下,需要分别控制每个因素,其中双蜗杆结构可以将齿廓间隙的影响降至接近于零。大多数“换向驱动噪音”的投诉都源于一到两个主要因素,而非所有五个因素的均匀增加。诊断哪个因素占主导地位是任何齿隙减小项目的第一步。
为什么反弹很重要——五弧分测试
上个月,一家韩国机床制造商的新项目负责人向我们订购了一套速比为 60:1 的蜗轮蜗杆传动装置,要求“符合工业标准齿隙”。最终确定应用场景是一台四工位旋转分度工作台,定位精度为正负 5 角分。而典型的蜗轮蜗杆传动装置的工业标准齿隙为 30 至 60 角分,是应用精度的 6 至 12 倍。这种不匹配并非供应商或客户的责任,而是由于将齿隙视为一个单一数值,而非由五个独立因素共同构成的系统属性所致。
每对蜗轮蜗杆传动装置在蜗杆螺纹和蜗轮齿之间都存在一定的间隙。这种间隙对于形成润滑油膜、适应热膨胀以及防止卡滞至关重要。问题的关键不在于是否需要间隙,而在于允许的间隙大小以及如何控制间隙的来源。那些声称“间隙在30到60角分之间”的文章只是在重复一个产品目录编号,而这个编号可能并不适用于实际应用。那些讨论“防间隙蜗轮蜗杆传动装置”的文章则在未明确间隙的真正来源之前就直接给出解决方案。正确的做法是先进行分解分析。
反弹的五大来源——分解
蜗轮轮缘处测得的总齿隙是五个分量之和。每个分量都有其自身的物理机制、可控范围和设计作用。这种分解至关重要,因为无论你如何拧紧其他分量,总齿隙都无法小于最大分量的齿隙值。
大多数通用工业驱动装置只有一两个主要组成部分——通常是齿形和轴承径向间隙——其他组成部分的影响很小。而精密分度应用则必须将所有五个组成部分都控制在相近的水平。
将典型误差项相加,情况就变得清晰起来。一般工业蜗轮蜗杆副的轮缘总间隙约为 0.08 至 0.34 毫米,换算成 100 毫米节圆半径的蜗轮蜗杆的齿隙为 30 至 90 角分。这个范围与大多数文章引用的产品目录数据相符,但并未给出解释。分解分析表明,这些数字并非绝对:每个误差源都可以单独减小,当每个部件都严格控制在其适用范围的极限值时,可以实现 0.02 毫米的精度。
如何测量反冲——千分表法
齿隙测量虽然简单,但第一次尝试很容易出错。以下步骤适用于任何蜗轮蜗杆副,从微型执行器到大型工业减速器均可适用。关键在于完全锁定蜗杆轴,确保齿轮上的所有测量运动都来自关节间隙,而不是蜗杆在负载下的轻微旋转。
- 将蜗杆轴锁定,防止其旋转。对于完整的减速器,使用夹具或压在键槽上的平面将输入轴固定住,防止其移动。对于测试夹具中的裸齿轮组,直接夹紧蜗杆轴。
- 将千分表安装在蜗轮轮缘附近的稳定参考面上。将千分表探针抵住轮缘上的平面,垂直于轮轴,并尽可能在最大可用半径处进行测量,以获得最高的测量灵敏度。
- 沿一个方向对轮辋施加轻微的切向力,直到蜗轮的齿轮完全啮合在一个侧面。将千分表归零。
- 反向施加切向力,大小相等,方向相反,直至齿轮在另一侧重新啮合。读取千分表读数——即为测量半径处的总齿隙。
- 如有需要,请转换为角度间隙:角度间隙(弧度)= 线性间隙(毫米)除以测量半径(毫米)。乘以 3437.75 可将弧度转换为角分。
- 在车轮圆周上的四个位置(间隔 90 度)重复上述步骤。车轮周围的齿隙变化可以揭示单次测量无法发现的齿间距误差和跳动效应。
- 记录四次读数、平均值和变化范围。平均值即为工作间隙;变化范围则反映了车轮本身的质量。
偏差超过平均值的25%通常表明齿轮不圆,或者由于滚刀磨损导致齿间距误差。如果偏差均匀分布在齿轮周围,但绝对值过高,则主要原因是固定间隙(键槽、配合、轴承),调整齿轮无法解决问题。
测量中一个容易让新手技师犯的错误是:千分表必须测量轮辋的位移,而不是千分表底座相对于轮毂壳体的位移。如果千分表安装在车轮旋转的同一壳体上,切向力作用下壳体的形变会造成虚假的间隙。因此,应将千分表安装在外部刚性框架上,而不是变速箱壳体本身。我们第一次对一位日本客户的分度台进行间隙检测时,将千分表底座从变速箱盖移到花岗岩台面上的独立磁性支架上后,表观间隙立即下降了40%。
为索引应用程序设计反冲预算

一旦将五个因素分解开来,设计工作就变得简单了。将总预算分配到这五个组成部分,要知道,成本最低的削减来自那些本身可控范围就最大的组成部分,而成本最高的削减则来自像齿廓这样需要特殊几何形状的组成部分。
考虑一台用于韩国汽车零部件焊接机的精密分度旋转工作台。分度精度规格:工件处(距轮毂中心 250 毫米)精度为 ±30 角秒。换算成工件半径处的线性精度为 ±0.036 毫米,再按比例缩放,在 125 毫米轮辋处精度为 ±0.018 毫米。总双向反向间隙预算:轮辋处为 0.036 毫米。在每个可控范围的极限位置,将间隙分配到五个来源:
请注意,齿廓参数占总预算的一半以上。这很常见——齿廓间隙是结构上最大的误差来源,需要进行最大程度的减小(双蜗杆几何形状)才能满足精度预算要求。其他四个参数更容易单独控制,且占比相对较小。
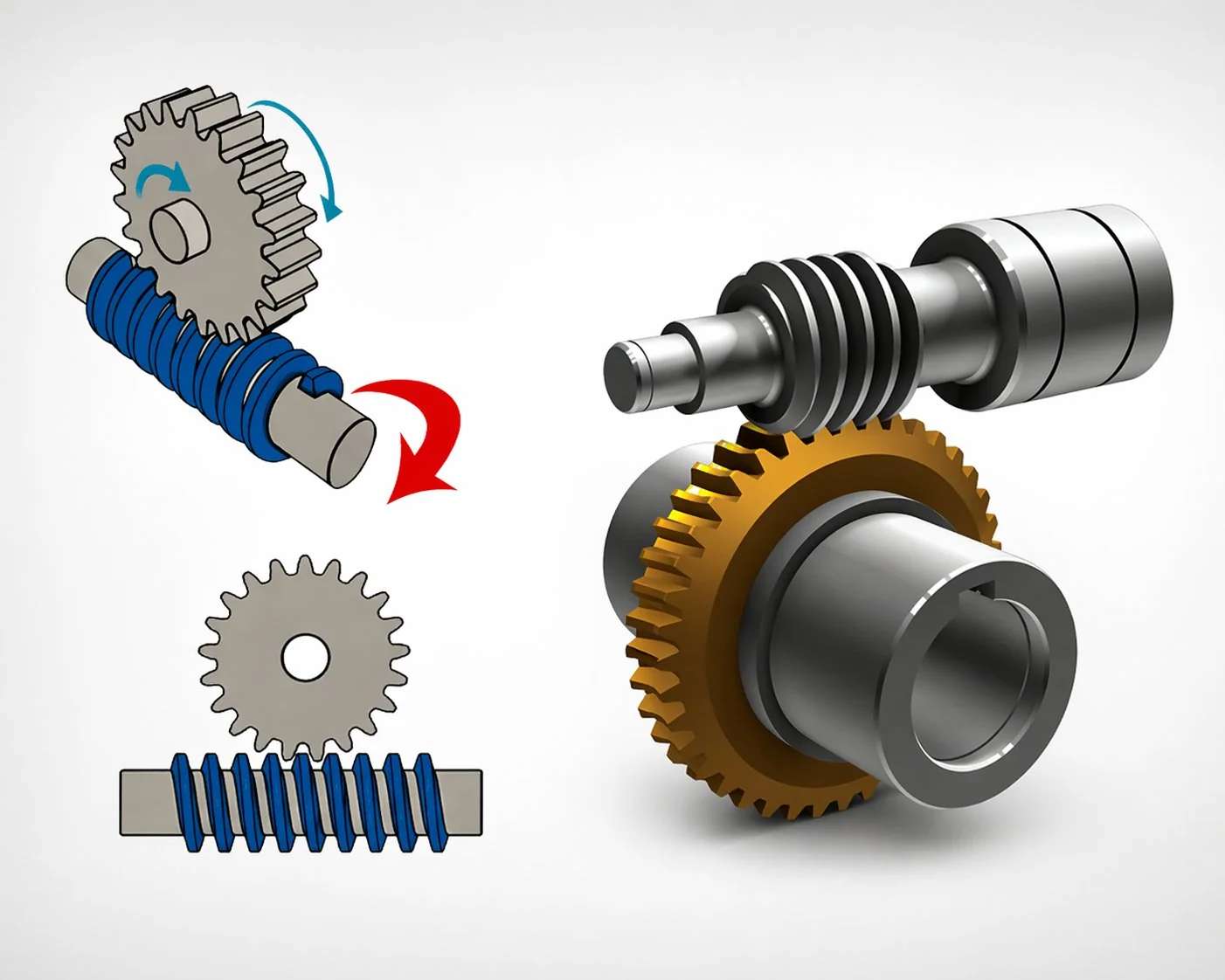
双联(防反冲)蜗轮蜗杆技术
双螺旋蜗杆的每根螺纹左右两侧的螺距都略有不同。这种螺距差异使得蜗杆的齿厚沿蜗杆长度方向变化——一端较薄,另一端较厚。
蜗杆相对于齿轮轴向滑动,会改变啮合的轴向位置,从而改变与齿轮齿接触的齿厚。将蜗杆向较厚的一端移动,齿廓间隙减小;反之,间隙增大。同一对齿轮无需重新加工即可适应各种齿隙设置。
典型的双联蜗杆设计中,蜗杆轴向移动每 1 毫米,齿隙变化 0.02 毫米。由于齿轮的制造公差为 ±0.045 毫米,因此 2 毫米的蜗杆轴向位移即可覆盖从完全间隙到零间隙的整个公差范围。调整在装配时通过垫片和锁紧螺母装置完成,除非重新调整垫片,否则该设置将在整个驱动装置的使用寿命内保持不变。
关于双联齿轮几何结构,有两点需要注意。首先,零齿隙很少是最佳目标——零间隙会导致润滑油膜无法形成,摩擦力增大,磨损加速。大多数双联齿轮应用的目标是齿廓间隙为 0.02 至 0.04 毫米,这样既能保证定位精度,又能为油膜的形成留出空间。其次,双联齿轮几何结构无法后期改装。蜗杆和齿轮在出厂时就已经是成对匹配的,如果将标准蜗杆替换到双联齿轮壳体中,则会完全丧失调整能力。
使用寿命期间的间隙漂移
在硬盘的整个使用寿命期间,反向冲量并非恒定不变。五个反向冲量来源中的每一个都会按照各自的时间尺度发生偏移,而总反向冲量则呈现出一种维护团队可以监控的特征模式。
通过定期测量来跟踪间隙是目前最便宜的状态监测技术之一——每季度用千分表进行 5 分钟的检查,就能在其他方法发现磨损之前很久就发现磨损的迹象。
随着青铜轮齿的磨损,齿廓间隙会随着运行时间的增加而稳步增大。典型的工业驱动装置在额定载荷下,每运行1000小时齿廓间隙会增加0.003至0.008毫米;在长期过载情况下,齿廓间隙的增加速度会加快至每运行1000小时0.015毫米。当轴承磨损超过其疲劳阈值时,轴承径向间隙会逐步增大。键槽间隙会在键在反向载荷作用下发生微动磨损时增大。除非发生灾难性故障,否则轮毂轴配合和热膨胀基本保持不变。
维护团队如果按季度记录齿轮间隙并绘制趋势图,通常可以提前六到十二个月预测齿轮箱的更换时间——远在齿轮间隙增大到影响输出定位精度或触发下游报警之前。如需完整的驱动单元,请浏览标准产品。 蜗轮减速器 选项包括工厂反冲规格和大多数机架尺寸的现场调整装置。
三个真实的反冲控制案例
案例1——韩国机床分度表
一家韩国汽车零部件焊接公司要求在用于门框焊接夹具的四工位旋转工作台上实现±30角秒的定位精度。初始规格:标准50:1蜗轮减速器。第一个原型机的测量齿隙为35角分,是应用公差的70倍。诊断结果:齿廓间隙在轮缘处为0.12毫米,键槽间隙为0.04毫米。解决方案:改用齿廓目标值为0.020毫米的双联蜗轮蜗杆,手工装配平行键将键槽间隙减小到0.005毫米,预紧角接触轴承将径向间隙减小到0.005毫米。最终测量齿隙:轮缘处为0.034毫米,相当于±28角秒——在应用公差范围内,且略有余量。总成本比标准减速器高出约2.4倍。由于定位误差直接影响焊接质量,因此该应用需要更高的成本。
案例 2 — 日本半导体晶圆阶段
一家日本半导体设备OEM厂商需要晶圆处理旋转台实现亚角秒级的定位精度。轮缘处的齿隙预算为0.005毫米——远低于任何蜗轮蜗杆传动技术的实际极限。诊断:蜗轮蜗杆传动并非此精度等级的合适技术选择。解决方案:完全放弃蜗轮蜗杆传动方案,转而采用直驱力矩电机和谐波驱动作为备用方案。经验教训:当预算计算表明,即使对每个齿隙来源进行最严格的控制也无法满足要求时,解决方案并非采用更先进的蜗轮蜗杆传动技术,而是采用不同的齿轮传动技术。采用全双工和紧密轴承的蜗轮蜗杆传动轮缘处的精度约为0.02毫米;低于此精度,谐波驱动或直驱才是更合适的选择。
案例 3 — 越南纺织织机定位器
一家越南纺织织机制造商报告称,其线定位驱动装置运行4个月后出现“换向噪音”。初步判断:是磨损的铜轮需要更换。齿隙测量结果显示,轮缘处的齿隙为0.42毫米,远高于出厂规格0.18毫米。进一步分析发现:齿廓仅从0.08毫米略微增长至0.12毫米。主要的新问题是轴承径向间隙,其从出厂时的0.02毫米增长至0.18毫米——轴承磨损,而非齿轮副本身。解决方案:更换轴承,保留原有的蜗杆和齿轮,并将齿隙恢复至0.16毫米。总成本:约为更换整套齿轮副成本的8%。经验教训:并非所有齿隙增大的故障都意味着齿轮磨损。在更换之前进行故障分析可以节省仍可使用部件的成本。
常见问题解答
问:零反弹是一个现实的设计目标吗?
几乎不可能。零齿隙意味着蜗杆和齿轮的齿面始终保持接触,这会阻止接触面之间形成润滑油膜。摩擦力增大,发热量增加,磨损也急剧加快。实用的“防齿隙”设计目标是将齿廓间隙控制在 0.01 至 0.04 毫米之间——既足够小以实现精确定位,又足够大以维持油膜。真正的零齿隙设计(弹簧预紧式分体蜗杆)虽然可行,但需要精心选择润滑剂,并且会因此牺牲使用寿命。
问:齿隙在线性和角度单位之间如何转换?
半径为 R 的线性间隙可通过以下公式转换为角度间隙:角度间隙(弧度)= 线性间隙(毫米)/ R(毫米)。乘以 3437.75 可将弧度转换为角分,乘以 206265 可将弧度转换为角秒。例如:在 100 毫米轮缘半径处测得的 0.05 毫米线性间隙等于 0.0005 弧度,等于 1.72 角分,等于 103 角秒。同样的 0.05 毫米间隙,在 25 毫米轮缘半径处则会产生 6.88 角分,情况糟糕了四倍。务必在指定线性间隙值的同时指定测量半径,或者直接指定角度间隙值。
问:我可以在不更换零件的情况下减少现有变速箱的齿隙吗?
有时——这取决于哪个因素占主导地位。如果输出轴承间隙是主要因素,更换间隙更小的轴承通常可以恢复50%的原始齿隙,而无需改动齿轮。如果键槽间隙因键磨损而增大,安装稍大一些的键即可恢复原始规格。如果齿廓间隙占主导地位,则固定几何形状的蜗轮蜗杆无法在原位进行调整——更换是唯一的办法。可调中心距设计允许一定程度的齿廓调整,但仅限于为此设计的壳体。在决定更换齿轮之前,务必先诊断出主要因素。
问:齿隙与齿轮精度等级之间有什么关系?
精度等级(DIN 5、6、7、8)控制的是齿间轮廓误差和总累积节距误差,而非平均齿隙。DIN 5 级磨削蜗轮蜗杆副的齿面几何形状比 DIN 8 级滚齿蜗轮副更紧密,但它们的平均齿隙可以设置为相似的值。它们的区别在于齿轮周围的齿隙变化——DIN 5 级可能出现 0.005 毫米的变化,而 DIN 8 级则可能出现 0.030 毫米的变化。对于齿隙变化至关重要的应用(例如伺服定位、平滑运动控制),精度等级与平均齿隙同样重要。对于仅需保持一致换向位置的应用,平均齿隙是主要指标。
问:温度如何影响磷青铜轮和钢蜗杆之间的反冲?
磷青铜的热膨胀系数约为每摄氏度18ppm,而渗碳钢的热膨胀系数为每摄氏度11ppm。随着温度升高,青铜齿轮的膨胀速度比钢制蜗杆和壳体更快。对于节圆直径为100毫米的齿轮,30摄氏度的温度波动会导致齿轮直径变化约0.054毫米——其中大部分会直接转化为工作温度下齿廓间隙的减小。因此,冷启动时的齿隙大于热运行时的齿隙,需要在宽温度范围内运行的精密应用设计中考虑冷启动情况(齿隙最大),同时确保热运行时的齿隙始终保持在零值。
问:在图纸中,我应该用弧分还是毫米来表示反冲?
两者皆是。韩国和日本的OEM厂商规范通常将角度值作为主要规范(例如“双向最大反向间隙12弧分”),并将特定半径下的等效线性值作为次要参考值(例如“在100毫米螺距半径下相当于0.07毫米”)。这种双重规范消除了供应商的歧义,并为检验团队提供了直接的测量目标。单独给出线性值而不指定半径是模糊的;单独给出角度值虽然精确,但难以在工作台上测量。两者结合使用,才能使规范清晰明确且便于检验。
问:齿隙如何影响蜗轮传动比的计算和安装方式的选择?
传动比越高,在相同的输入运动下,输出端的齿隙就越大,因为单位输入运动对应的输出旋转距离越短。例如,100:1 的传动比,如果轮缘齿隙为 0.1 毫米,则输入轴在输出啮合反转之前需要移动 10 毫米——这在传送带上虽然令人烦恼但无害,但在伺服定位器上却是无法容忍的。安装方式也很重要:分体式轮毂夹紧方式不会产生关节齿隙,因为摩擦力在整个孔径圆周上均匀分布;而键槽安装方式则始终存在键槽间隙。对于高传动比的精密应用,除了齿轮副的齿隙规格外,传动比和安装方式的选择也需要仔细考虑。
蜗轮蜗杆传动副的齿隙并非一个可以与供应商讨价还价的单一数值。它是一个由五个独立因素共同构成的预算,每个因素都可测量,都可通过特定的设计措施进行控制,并且每个因素都会在其使用寿命期间根据自身的时间尺度发生漂移。那些只引用“典型值为 30 至 60 角分”而不解释其分解过程的文章,会让设计工程师无法获得精确的结果。只有将预算分解,如实分配每个组件的参数,并将组装好的传动装置与预算进行比较的工程师,才能一次性可靠地达到应用所需的公差。
对于开发精密分度、机床或伺服定位应用的韩国和日本OEM设计团队,我们的工程团队会根据您的精度要求进行五源齿隙分解,并推荐符合预算的齿轮副、安装方式、轴承和键槽组合。标准产品目录 精密双联蜗轮蜗杆传动装置 产品涵盖从通用工业应用到索引级应用的全系列产品。可根据图纸定制几何形状,交货周期为 6 至 8 周——欢迎垂询。 预算审查 根据您提供的准确度要求,我们的团队将在一个韩国工作日内返回五源分配方案。
编辑:Cxm


























